
Invited research
2019-2020
A list of invited researches during 2019 April – 2021 March is here.
2021-2022
B01 Sprouting of soft sciences
B01-14: Development of a soft microswimmer powered by noise
- Leader
- Takuji Ishikawa (Tohoku University)
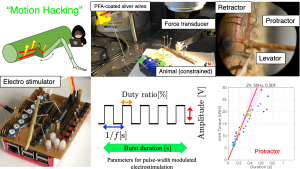
B01-15: Motion hacking elucidates flexible inter-leg coordination mechanism in insect locomotion
- Leader
- Dai Owaki (Tohoku University)
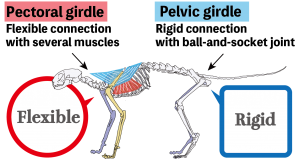
B01-16: Development of adaptive stiffness control mechanism focusing on quadruped’s flexible shoulder hammock
- Leader
- Akira Fukuhara (Tohoku University)
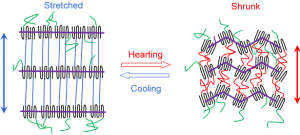
B01-17: Development of high-performance fiber actuators driven by tie molecules
- Leader
- Hiroki Uehara (Gunma University)
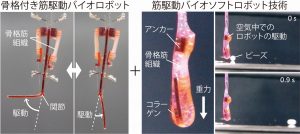
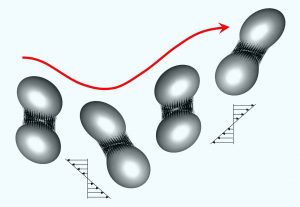
B01-18: Biohybrid softrobots powered by skeletal muscle tissue capable of high-speed motion
- Leader
- Yuya Morimoto (University of Tokyo)
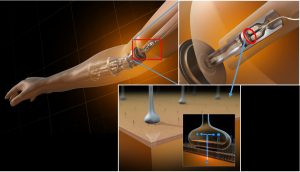
B01-19: Neural interface for biohybrid prosthetic arm that realize sensory and motor functions
- Leader
- Tohru Yagi (Tokyo Institute of Technology)

B01-20: Green robotics: development of biodegradable soft robotic elements
- Leader
- Jun Shintake (The University of Electro-Communications)
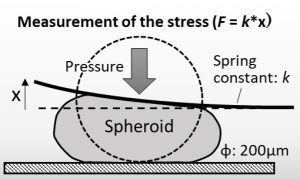
B01-21: A novel analyzing method of tissue deformation to understand molecular biology of softness of living organisms
- Leader
- Shotaro Tanaka (Tokyo Women’s Medical University)
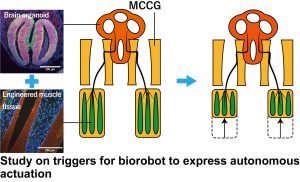
B01-22: Study on triggers for bio-robots to express autonomous actuations
- Leader
- Kazuya Furusawa (Fukui University of Technology)
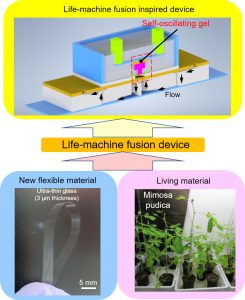
B01-23: Soft chemical micropump actuated by self-oscillating polymer gel
- Leader
- Yo Tanaka (RIKEN)
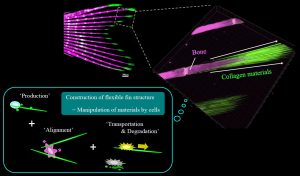
B01-24: Mechanism for the morphogenesis of flexible fins assembled by cells manipulating rod-shaped equipment
- Leader
- Junpei Kuroda (Osaka University)
B02 Introducing soft robots throughout society
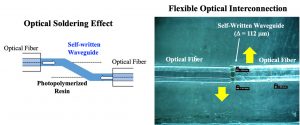
B02-04: Growth control of self-written optical waveguides using gel materials and their application to flexible optical interconnections
- Leader
- Okihiro Sugihara (Utsunomiya University)
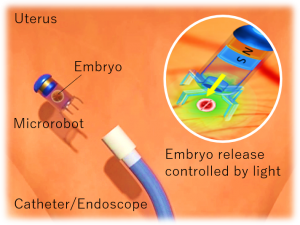
B02-05: Development of an embryo transfer system using a light-actuated microrobot
- Leader
- Masashi Ikeuchi (University of Tokyo)
B02-06: Soft peristaltic mechanism based on enteric neural structure for chemical/food plants
- Leader
- Taro Nakamura (Chuo University)

B02-07: Design of an interaction model for a soft robot that grows out of the bod
- Leader
- Seong Young ah (Hosei University)
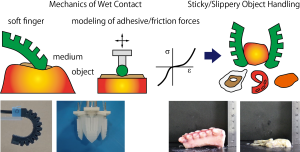
B02-08: Mechanics of Wet Contact with Applications to Sticky/Slippery Object Manipulation
- Leader
- Shinichi Hirai (Ritsumeikan University)