Outline of the area
Remarks by the area manager of Science of Soft Robots

Area manager: Professor Koichi Suzumori
(Tokyo Institute of Technology)
Since the dawn of history, advances in science and technology have pursued “power” and “accuracy.” Initially, “hardness” in machines and materials was sought for reliable operations. In recent years, biological systems oriented toward “softness” have emerged simultaneously in diverse fields, including machinery, electronics, information processing, and materials science. This is not just a coincidence. In particular, there is a growing trend toward biomedical/human-centered science and technology.
In our area of Science of Soft Robots, we have combined emerging academic fields aimed at “softness” to increase the exposure and collaboration of researchers in different fields. Our efforts will create a big academic trend based on values that are a paradigm shift to conventional science and technology. Japan has top-tier researchers in numerous fields. It is time to bring them together to realize a new academic area called the “Science of Soft Robots” based on “softness.”
Aims and scope
Our area of Science of Soft Robots focuses on “softness” peculiar to organisms as a platform for life phenomena. The international trend of science and technology “from hard to soft” is driven by the desire to replicate the behaviors and functions of humans and living organisms. This area brings together academic researchers in diverse fields that refer to “softness” as an organic collection of biology, information science, materials science, and mechanical/electrical engineering. As the introduction of softness will induce a paradigm shift in research, we believe that vast knowledge, which has not been drawn from existing academic fields, will be elucidated.
Here, we propose “artificial autonomous systems based on the concept of biological systems” with features of living organisms. We define such systems as “soft robots.” The soft body of a living organism, its form, structure, mechanism, and information processing fundamentally differ from artificial things that are currently being built. We call this frontier academic area the “Science of Soft Robots.” The Science of Soft Robots aims to integrate new academic challenges in numerous fields and to create an active academic trend toward science of soft robots.
Approach
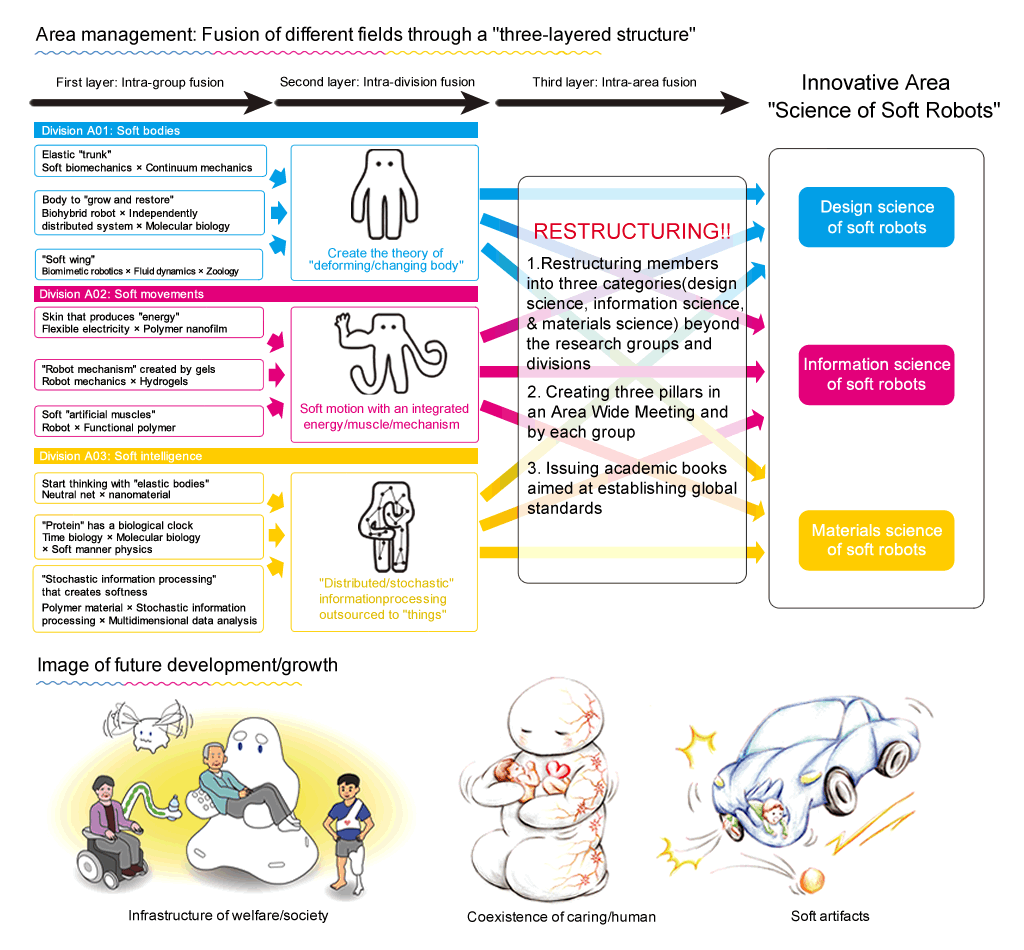
The Science of Soft Robots aims to not only imitate and reproduce organisms but also learn from living organisms to create artificial systems. The framework consists of three categories: “Design science of soft robots,” “Material science of soft robots,” and “Information science of soft robots.”
Soft Robot Design Theory aims to blend mechatronics and biomechanics to achieve “flexible and elastic bodies.” It also creates biohybrid devices that incorporate living cells. Soft Robot Material Science strives to create “flexible movements” in smart materials, which have yet to be incorporated into machines. We focus on soft mechanisms, which differ from conventional mechanisms. Topics include electronics with extreme softness/elasticity, artificial muscles comparable to biological muscles using polymer materials, and gears. Soft Robot Informatics aims to design “soft intelligence” in which software and hardware are inseparably combined. By utilizing soft material dynamics as an information processing device, we hope to push the limits of conventional information processing devices. In addition, by introducing a chemical reaction system in a soft body, we may obtain spontaneous periodic motions and a chemical body clock.