
A02-1 : Creation of freely deformable solar cells using elastic gradient nanothin films
Group members
| Leader | Kenjiro Fukuda (RIKEN) |
|---|---|
| Member | Toshinori Fujie (Tokyo Institute of Technology) |
Summary
 One of the technical challenges in soft robots is how to integrate a power source to create “soft movement.” Many soft robots are driven by pressurized air, but recent efforts have reported using light stimulation. Naturally, pressurized air requires high-pressure gas, but it is difficult to construct an integrated self-supporting soft robot to supply gas from the external environment with structures such as a hose. In addition, to employ a light stimulus, the robot must be constantly irradiated with light externally. These limitations make it difficult to realize self-supporting driving mechanisms.
One of the technical challenges in soft robots is how to integrate a power source to create “soft movement.” Many soft robots are driven by pressurized air, but recent efforts have reported using light stimulation. Naturally, pressurized air requires high-pressure gas, but it is difficult to construct an integrated self-supporting soft robot to supply gas from the external environment with structures such as a hose. In addition, to employ a light stimulus, the robot must be constantly irradiated with light externally. These limitations make it difficult to realize self-supporting driving mechanisms.
Dr. Fukuda successfully developed an extra thin organic solar cell, which was about 3-μm thick. Because it is very thin and lightweight, it can operate without hindering movement even if it is placed on a large, movable part. In addition, Dr. Fujie has developed a very soft polymer nanothin film.
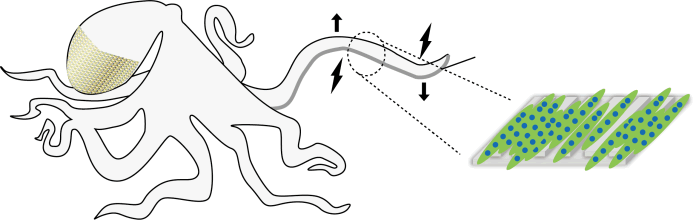
By expanding on past achievements, we aim to form electronic systems that drive a soft actuator by electrical stimulation without disturbing the flexible movements of a robot. Using the newly discovered polymer nanothin film with a gradient of elasticity as a base material and a sealing film as a platform for the solar cell element to form an organic solar cell layer, we strive to realize a freely deformable solar cell with minimal damage to the solar cell element during expansions and contractions. We plan to realize actuation by electric stimulations that utilize the generated power. By using the polymer nanothin film itself as an actuator or adhering the nanothin film to a soft actuator such as octopus’ feet or a jellyfish and clarifying the control of the actuation via the elastic gradient and electric stimulation, we will contribute to the academic field goal of “creating soft movement.”