
A03-1 : Breaking through information processing limits by combining soft dynamics and flexible sensor technology
Group members
| Leader | Kohei Nakajima (The University of Tokyo) |
|---|---|
| Member | Kuniharu Takei (Osaka Prefecture University) |
Summary
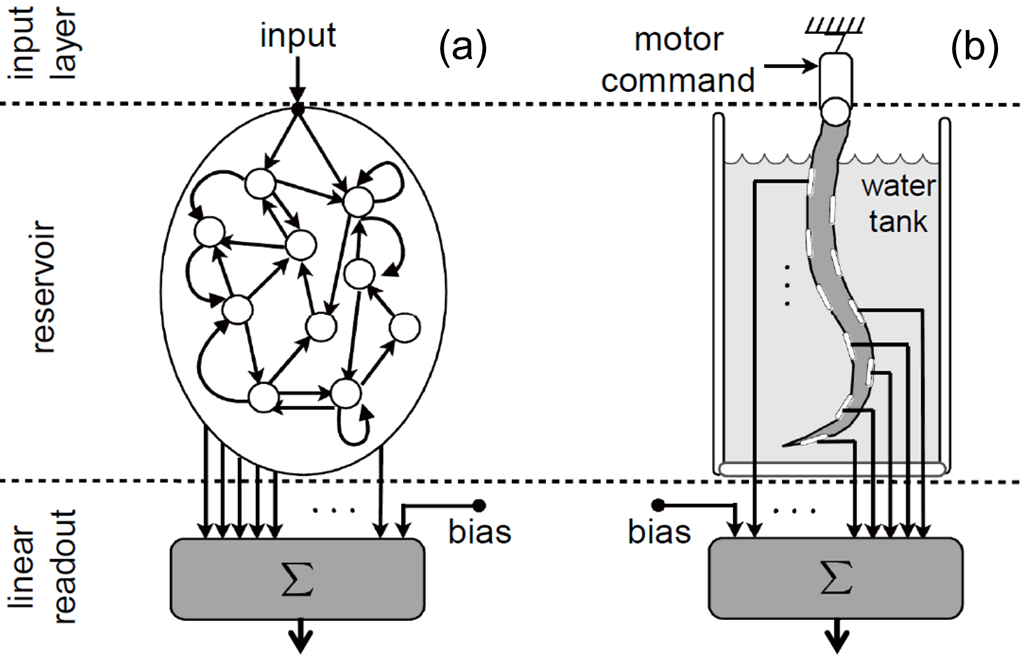 When a machine composed of soft materials is actuated, it generates a wide variety of dynamics, which are unique to its physical properties. Dr. Nakajima has shown that the dynamic properties of these soft materials can be actively utilized as computing resources. Specifically, the dynamics of soft materials can be regarded as a huge recurrent neural network for real-time calculations/machine learning such that embedded control programs can be implemented (see Figure). This technique is called Physical Reservoir Computing (PRC). When a soft material system is grasped through this technology, it can be regarded as a computer rich in resources.
When a machine composed of soft materials is actuated, it generates a wide variety of dynamics, which are unique to its physical properties. Dr. Nakajima has shown that the dynamic properties of these soft materials can be actively utilized as computing resources. Specifically, the dynamics of soft materials can be regarded as a huge recurrent neural network for real-time calculations/machine learning such that embedded control programs can be implemented (see Figure). This technique is called Physical Reservoir Computing (PRC). When a soft material system is grasped through this technology, it can be regarded as a computer rich in resources.
In this research project, we consider extensions of the past application range of the PRC approach to soft robots to maximize its potential. Although the dynamics of soft physical properties are inherently continuous, they are processed as time series data discretized spatiotemporally through sensors. To date, these sensors are comprised of hard materials. If multiple sensors are embedded in a device, its softness and diversity in dynamics are lost.
Regarding this point, research members are vigorously pursuing the development of sensors with soft materials. We strive to integrate state-of-the-art sensor technology with the PRC approach. In other words, we aim to maximize the information processing capability by monitoring the environment with a vast number of soft sensors without losing the original dynamics of the soft physical properties. Furthermore, by changing the properties and shapes of soft materials and introducing a plurality of actuators, we intend to not only systematically analyze how the information processing capability changes but also implement remote computation/communication via materials and autonomous control of motion.