
A03-1:やわらかいダイナミクスとフレキシブルセンサー技術の融合による情報処理限界の突破
研究チーム
| 研究代表者 | 中嶋 浩平(東京大学) |
|---|---|
| 研究分担者 | 竹井 邦晴(大阪府立大学) |
概要
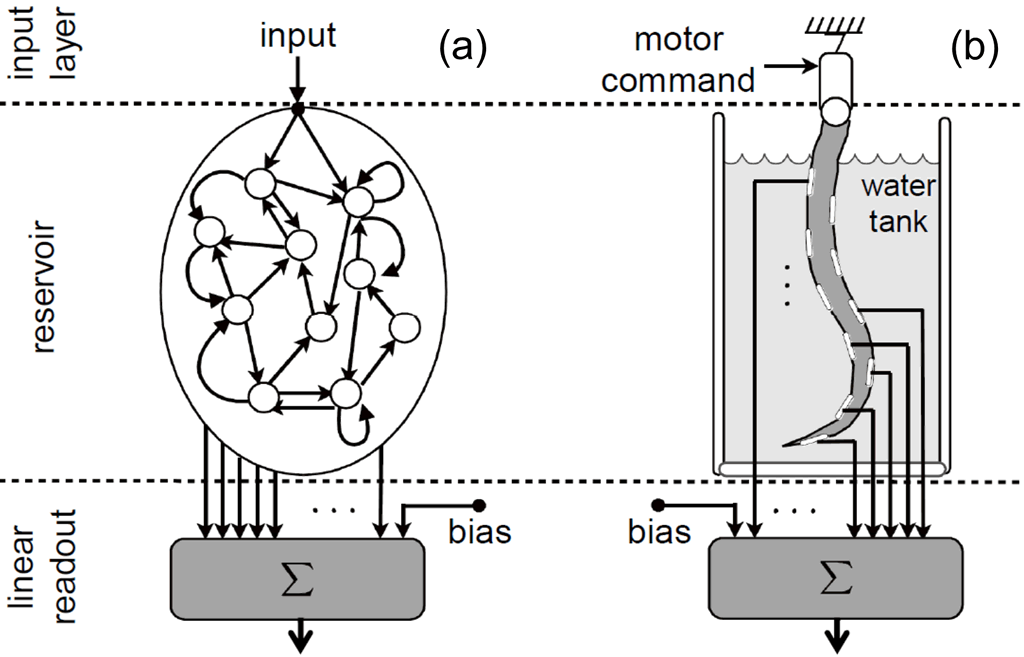 やわらかい材質でできた機械はアクチュエートされた際、その物性固有の極めて多様なダイナミクスを生成する。研究代表者はこれまでこれらやわらかい材料の持つ動的な特性が、実はそれ自体、積極的に計算資源として活用できることを示してきた。具体的には、やわらかい材料のダイナミクスを巨大なリカレントニューラルネットワークと捉え、制御プログラムを埋め込むなどの実時間計算・機械学習をそれ自体で実装できることを示した(図)。この技術はPhysical reservoir computing (PRC)と呼ばれる。やわらかい材料系をこの技術を通して捉える時、それは資源を豊潤に備えた計算機と見立てることが可能となる。
やわらかい材質でできた機械はアクチュエートされた際、その物性固有の極めて多様なダイナミクスを生成する。研究代表者はこれまでこれらやわらかい材料の持つ動的な特性が、実はそれ自体、積極的に計算資源として活用できることを示してきた。具体的には、やわらかい材料のダイナミクスを巨大なリカレントニューラルネットワークと捉え、制御プログラムを埋め込むなどの実時間計算・機械学習をそれ自体で実装できることを示した(図)。この技術はPhysical reservoir computing (PRC)と呼ばれる。やわらかい材料系をこの技術を通して捉える時、それは資源を豊潤に備えた計算機と見立てることが可能となる。
本研究課題では、ソフトロボットに対するPRCアプローチのこれまでの適用範囲を大幅に拡張し、そのポテンシャルを最大限引き出すことを考える。やわらかい物性のダイナミクスは本来的には連続体であるが、センサーを通して時空間的に離散化された時系列データとして処理されることになる。これまでは、このセンサーには、かたい材質のものが使われており、複数のセンサーをデバイスに埋め込むと、デバイスのやわらかさが失われ、そのダイナミクスの多様性も失われてしまうという難点があった。この点に関し、研究分担者は、やわらかい材質のセンサーの開発を精力的に進めている。その最先端センサー技術とPRCのアプローチを積極的に融合する。つまり、やわらかい物性の本来のダイナミクスを損なうことなくそのままに、膨大な数のやわらかいセンサーを用いてモニターすることで、その情報処理能力を最大限誘導することを目指す。さらに、やわらかい材質の物性・形状を様々に変化させ、複数のアクチュエータを導入することにより、どのように情報処理能力が変化するかを系統的に解析し、材料を介した遠隔計算・通信や運動の自律制御を実装することを目指す。