
A01-3 : Elucidation of the principles of flight and swimming of animals with soft bodies and microstructures and its implementation to soft robots
Group members
| Leader | Hiroto Tanaka (Tokyo Institute of Technology) |
|---|---|
| Members | Toshiyuki Nakata (Chiba University) |
| Takeshi Yamasaki (Yamashina Institute for Ornithology) |
Overview of research
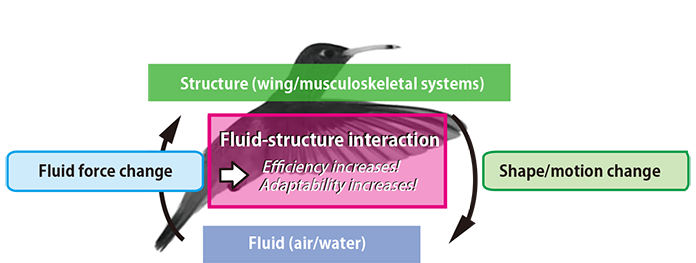 Soft robotics is inspired by living creatures that move skillfully with a soft body. In particular, flying and swimming animals utilize the FSI (fluid-structure interaction) mechanism where the fluid force and the flexible body interact each other. Its extreme design can be seen in the drastically oscillating wings and the associated musculoskeletal system where complex and fine structures are utilized. In this research, we aim to understand the principles and advantages of the FSI mechanism in flying/swimming animals and establish a design theory, fabrication method, and control law to realize flying/swimming soft robots.
Soft robotics is inspired by living creatures that move skillfully with a soft body. In particular, flying and swimming animals utilize the FSI (fluid-structure interaction) mechanism where the fluid force and the flexible body interact each other. Its extreme design can be seen in the drastically oscillating wings and the associated musculoskeletal system where complex and fine structures are utilized. In this research, we aim to understand the principles and advantages of the FSI mechanism in flying/swimming animals and establish a design theory, fabrication method, and control law to realize flying/swimming soft robots.
 We focus on avian species as model animals since they cover both wing-propelled flying in the air and wing-propelled swimming under water. Although both are propelled by wing flapping, the physical properties of the external fluid are different: air (low density, high dynamic viscosity, low Re number) and water (high density, low dynamic viscosity, high Re number). Therefore, studying flying and swimming birds should clarify how the FSI mechanism of flying/swimming soft robots should be designed in accordance with different requirements.
We focus on avian species as model animals since they cover both wing-propelled flying in the air and wing-propelled swimming under water. Although both are propelled by wing flapping, the physical properties of the external fluid are different: air (low density, high dynamic viscosity, low Re number) and water (high density, low dynamic viscosity, high Re number). Therefore, studying flying and swimming birds should clarify how the FSI mechanism of flying/swimming soft robots should be designed in accordance with different requirements.
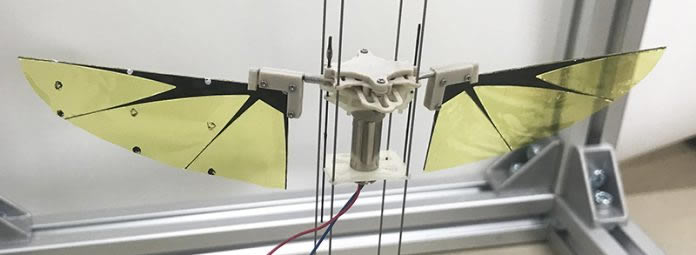
Our research plan consists of the following four parts. (1) Three-dimensional motion/shape measurements of animals and robots using new animal-mounted sensors, motion capture, and other image analyses; (2) measurements of multiscale bird morphologies via laser microscopy and high resolution X-ray CT; (3) elucidation and optimization of fluid structure coupling mechanisms of wing/musculoskeletal systems using numerical calculations and experimental models; and (4) implementation to soft robots making full use of new microscopic processing such as laser processing, self-organizing wrinkles, and origami-like three-dimensional structures at the submillimeter to centimeter level. These endeavors should realize the efficiency and robustness unique to living organisms in flying/swimming soft robots. Such robots can support human activities by working in complicated resident area and expand range of human activity by exploring harsh environments that are inaccessible by humans such as the deep ocean or the outer atmosphere.