
B01-16 : Development of Adaptive Stiffness Control Mechanism Focusing on Quadruped’s Flexible Shoulder Hammock
Summary
| Leader | Akira Fukuhara (Tohoku University) |
|---|
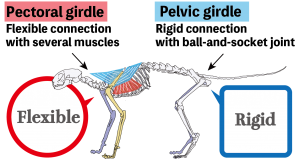
This study aims to understand essential design principles underlying versatile animal behaviors, especially focusing on distinct connectivity to the trunk between fore and hindlimbs. In cursorial quadrupeds, e.g., cheetah and horse, the pelvic girdle (the base of hindlimbs) has deep ball-and-socket joints between the pelvis and hindlimbs, and these secure connections can translate the reaction force from the ground to the whole body efficiently. In contrast, forelimbs connect to the chest through several muscles like a hammock (i.e., shoulder hammock structure). These flexible connections allow the forelimbs to adapt to changes in the environment immediately. It is expected that understanding the integration of clever mechanisms and flexible control systems underlying adaptive animal behaviors sheds new light on the design scheme of soft robots. To this end, this study elucidates the functionality of the flexible shoulder hammock structure in various tasks (e.g., walking, running, and jumping) and develops its control mechanism from the viewpoints of anatomy and decentralized control scheme.