
B02-08 : Mechanics of Wet Contact with Applications to Sticky/Slippery Object Manipulation
Summary
| Leader | Shinichi Hirai (Ritsumeikan University) |
|---|
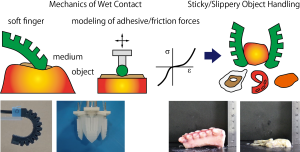
The purpose of this research is to elucidate the dynamics of wet contact with realizing the handling of sticky/slippery objects. Environment where soft robots operate include not only objects with dry surfaces but also objects with wet surfaces. For example, when a hand with soft fingers grasps sea foods or underwater organisms, soft fingers will make a contact with a surface covered with water or mucus. Contact between a soft robot and a wet surface causes a phenomenon different from dry contact, such as adhesive force, reduced friction, and slipperiness. Here contact with soft and wet surfaces is referred to as wet contact, and we aim to elucidate its mechanics. Contact between a soft robot and a wet surface depends on macroscopic behavior such as deformation of the soft robot and the surface, and movement of the medium on the wet surface. In this research, we measure and formulate the adhesive and friction forces in wet contact under various media and surface shapes/textures. Furthermore, based on the results, we will establish a method to realize the handling of sticky/slippery objects based on the mechanics of wet contact, with applications to handling of sea foods or underwater organisms by a robotic hand with soft fingers.