
B01-18 : Biohybrid softrobots powered by skeletal muscle tissue capable of high-speed motion
Summary
| Leader | Yuya Morimoto (University of Tokyo) |
|---|
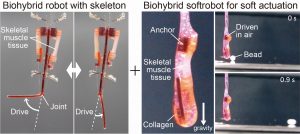
Skeletal muscle tissue is a promising candidate to be used as a driving source in soft robotics due to not only its linear actuation ability but also flexibility and proliferative characteristics. We have succeeded in formation of skeletal muscle tissue by cultivating muscle cells on a flexible substrate, and construction of a biohybrid soft robot driving in the air, showing how to construct a biohybrid soft robot using skeletal muscle tissue. However, the biohybrid soft robot cannot move at high speed because its driving speed depended on the contraction speed of the muscle tissue. On the other hand, skeletal muscles are the source of force in living organisms, and high-speed motion is achieved by accumulating and releasing the force in other elastic elements such as skeleton and tendon. In this research project, we aim to understand the principle of high-speed soft motion using restorative force by fusing a flexible robot skeleton and skeletal muscle tissue, and to establish a method for constructing and controlling a biohybrid soft robot capable of high-speed motion.