
B01-17 : Development of High-Performance Fiber Actuators Driven by Tie Molecules
Summary
| Leader | Hiroki Uehara (Gunma University) |
|---|
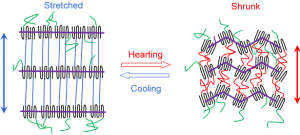
Actuator composed of coiled-coil polymeric fibers used as fishing line has been applied for a device with meta1-coating, which shrinks when heated with switching-on and stretched when cooled with switching-off. Mechanisms of such shrinking and stretching behaviors were analyzed by in-situ measurements. The obtained results indicate that the targeted actuator properties were dominated by amorphous “tie molecules” connecting the crystalline lamellae. When ultra-high molecular weight polymers are drawn, molecular entanglements are segregated into the amorphous phase, which also transmit the applied stress. Branching or crosslinking molecules play a similar role for actuating application. In this study, these molecular entangling, branching and crosslinking characteristics of polymeric chains are utilized for preparation of highly stretchable and shrinkable fibers, and the obtained fibers are applied for improving the various actuator properties.