
A02-1:弾性グラディエントナノ薄膜を利用した自由変形可能な太陽電池の創成
研究チーム
| 研究代表者 | 福田 憲二郎(理化学研究所) |
|---|---|
| 研究分担者 | 藤枝 俊宣(東京工業大学) |
概要
 ソフトロボットが要請する技術課題として、「しなやかな動き」を生み出す動力源の問題をどのように一体化させるかという点が挙げられる。ソフトロボットの駆動として用いられるものは圧空が多く、近年では光刺激によってソフトロボットを制御する取り組みが報告されている。圧空は当然高圧のガスが必要であり、ホース等によって外部からそのガスを供給するために一体化・自立型のソフトロボットの構築は困難である。また、光刺激も外部から常に光を照射する必要があり、自立型の駆動を実現することは難しい。
ソフトロボットが要請する技術課題として、「しなやかな動き」を生み出す動力源の問題をどのように一体化させるかという点が挙げられる。ソフトロボットの駆動として用いられるものは圧空が多く、近年では光刺激によってソフトロボットを制御する取り組みが報告されている。圧空は当然高圧のガスが必要であり、ホース等によって外部からそのガスを供給するために一体化・自立型のソフトロボットの構築は困難である。また、光刺激も外部から常に光を照射する必要があり、自立型の駆動を実現することは難しい。
応募研究代表者の福田は過去の研究成果によって、厚み 3µm 程度超薄型有機太陽電池の形成することに成功した。非常に薄く軽量のため、可動域の大きな部分に装着しても動きを阻害すること無く動作できることを見出している。また、研究分担者の藤枝は非常に柔らかい高分子ナノ薄膜の形成に成功している。
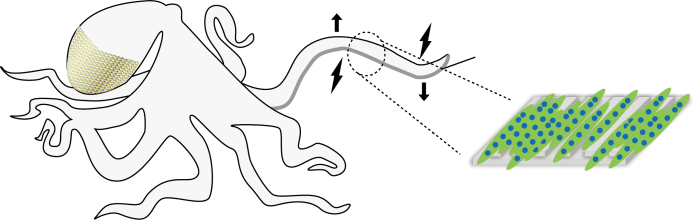
本研究では過去の成果を発展させることで、しなやかなロボットの動きを阻害せずにエレクトロニクスを形成し、その電気刺激によってソフトアクチュエータを駆動することを着想した。太陽電池素子のプラットフォームとなる基材および封止膜の弾性に勾配(グラディエント)をつけた高分子ナノ薄膜を新たに開発し、その上に適切に有機太陽電池層を形成することで、伸縮時の太陽電池素子ダメージを極限まで抑えた自由変形可能な太陽電池の実現を目指す。その構造体を利用して、太陽電池によって発生された電力を利用して電気刺激によるアクチュエーションを実現することを目指す。高分子ナノ薄膜自身をアクチュエータとして利用する、またはタコの足やクラゲのような柔らかいアクチュエータに上記のデバイスを貼付し、弾性の勾配と電気刺激によってアクチュエーションを制御するところまでを明らかにすることによって、領域が目指す「しなやかな動きを作り出す」学問領域の推進に貢献する。