
B02-08:ウェットコンタクトの力学と粘滑物ハンドリングへの応用
概要
| 研究代表者 | 平井 慎一(立命館大学) |
|---|
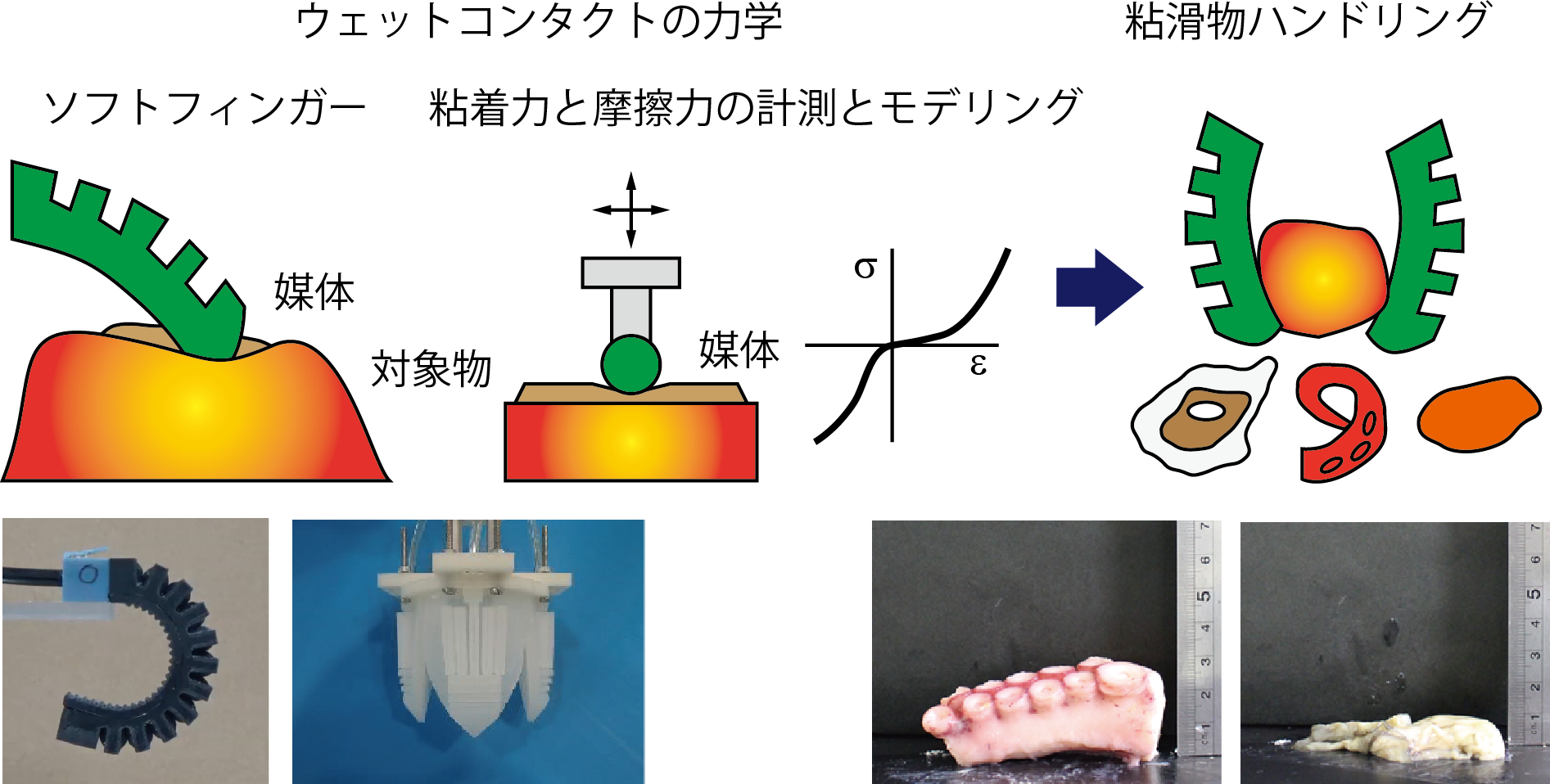
本研究の目的は,ウェットコンタクトの力学を解明するとともに,その成果を踏まえて粘滑物のハンドリングを実現することである.ソフトロボットが活動する環境は,ドライな表面を有する物体のみならず,ウェットな表面を有する物体を含む.たとえば,ソフトハンドによる海産物や水中生物の把持においては,水や粘液で覆われた表面との接触が生じる.ソフトロボットとウェットな表面との接触では,粘着力が生じ,摩擦が減少し滑りやすくなるなど,ドライな接触とは異なる現象が生じる.そこで,柔らかく表面がウェットな物体の接触をウェットコンタクトと称し,その力学を解明することを目指す.ソフトロボットとウェットな表面との接触は,ソフトロボットや対象物の変形,ウェットな表面における媒体の移動など,マクロな挙動に大きく影響される.そこで本研究では,様々な媒体や表面形状のウェットコンタクトにおいて,粘着力と摩擦力を計測・定式化する.さらに,その成果を基に,表面に粘着性や潤滑性を有する粘滑物のハンドリングを実現する手法を確立する.