
B02-06:腸管神経機能を規範とした蠕動運動型柔軟機構の食品/化学系製造プロセスへの社会展開
概要
| 研究代表者 | 中村 太郎(中央大学) |
|---|
本提案では,「ソフトロボットのひとつである蠕動運動型駆動システムの社会実装に関する課題を解決すること」を目的とする.
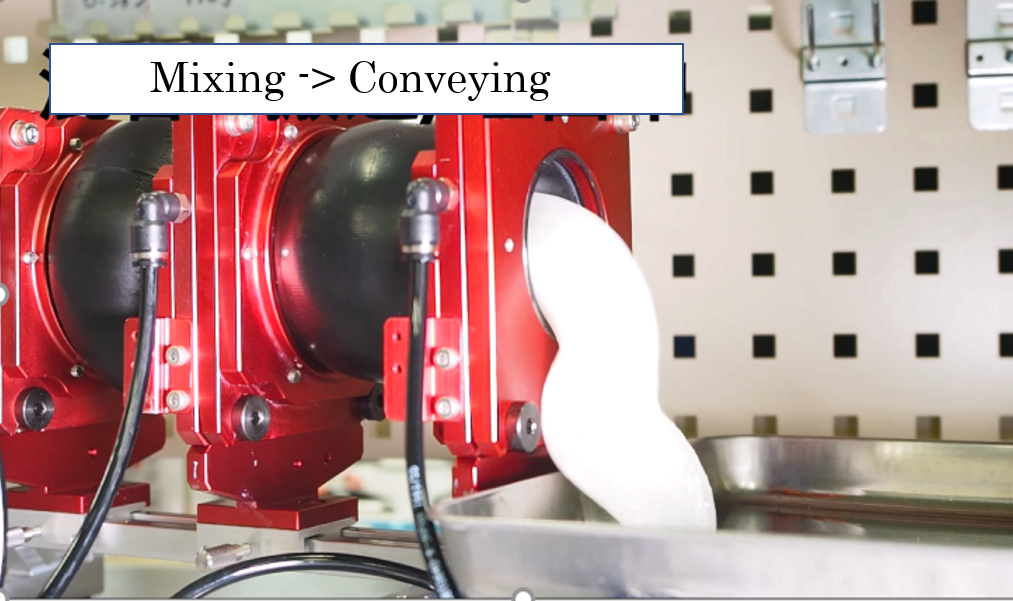
アフターコロナの世界では,労働集約型の環境は回避され,製造や建築分野を中心として,人と機械が混在して働くような自動化環境の構築が加速していく.このような環境においては安全性が最優先されるため,ソフトロボットの需要はますます拡大することが予想できる.特に,化学薬品・食品系企業の製品化工程における上流プロセスでは,原料となるスラリー状の固液混合物の「混合」や「搬送」における運用が大きな課題となっている.
そこで、担当者らはソフトアクチュエータを用いた大腸型の蠕動運動ポンプを開発し,実用化への検討を進めており、本領域第1回公募研究において、被搬送物の内部状態のセンシングや生物創発性の高い制御系への適用を試みた.
本研究では,前回公募研究の成果を発展させ,社会実装において実際に要求される機能や仕様に基づいた蠕動運動型ポンプの計測制御システムを構築する.具体的には,「被搬送物体の高度な混合状態推定」および「混合・搬送における効率的な制御手法」を確立する.
本研究は,蠕動運動,ひいてはソフトロボット学における社会展開への可能性を広げるきっかけになると考える.