
B01-18:高速動作可能な骨格筋組織駆動型バイオソフトロボットの創成
概要
| 研究代表者 | 森本 雄矢(東京大学) |
|---|
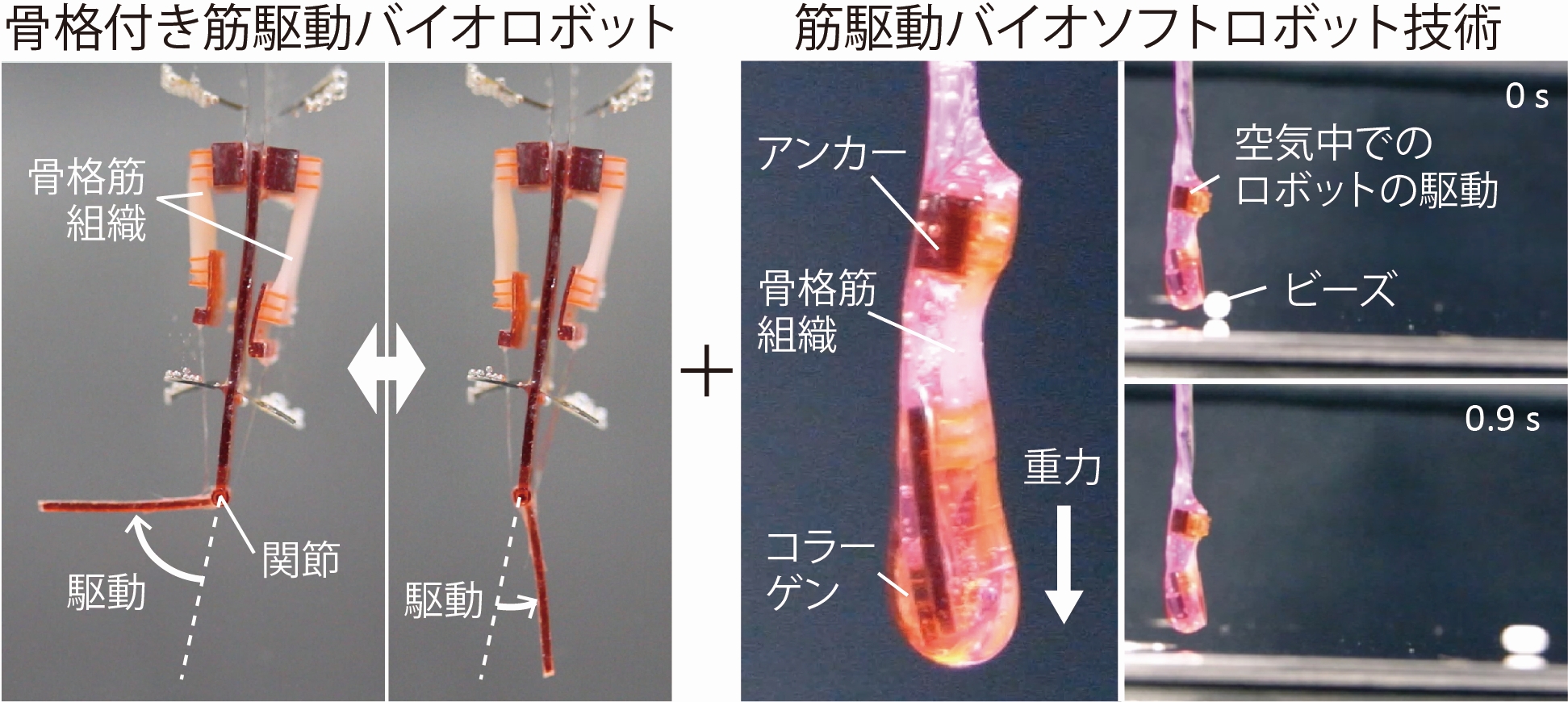
生体のような柔軟な動作を実現するソフトロボットの駆動源として、伸縮動作可能なだけでなく増殖による自己再生能を有する骨格筋組織の使用が期待されている。これまでに柔軟基板上での筋細胞培養による骨格筋組織の構築に成功しており、皮膚様構造での保護による空気中での駆動が可能なバイオソフトロボットを実現し、骨格筋組織を駆動源とするバイオソフトロボットの構築法を明らかにした。しかし、バイオソフトロボットの駆動速度は筋組織の収縮運動速度に依存しており、高速動作できないという課題を有していた。一方、生体では骨格筋は力の発生源であり、骨格など他の要素にてその力を溜めて一気に開放することで、速度の遅い筋収縮を起因とする高速動作を実現している。そこで本研究計画では柔軟なロボット骨格と骨格筋組織を融合することで、復元力を利用した柔らかな高速動作の原理を理解し、高速動作可能なバイオソフトロボットの構築法および制御法の確立を目指す。