
B01-16:四脚動物の肩部ハンモック構造から切り拓く即時適応的な柔剛調節メカニズム
概要
| 研究代表者 | 福原 洸(東北大学) |
|---|
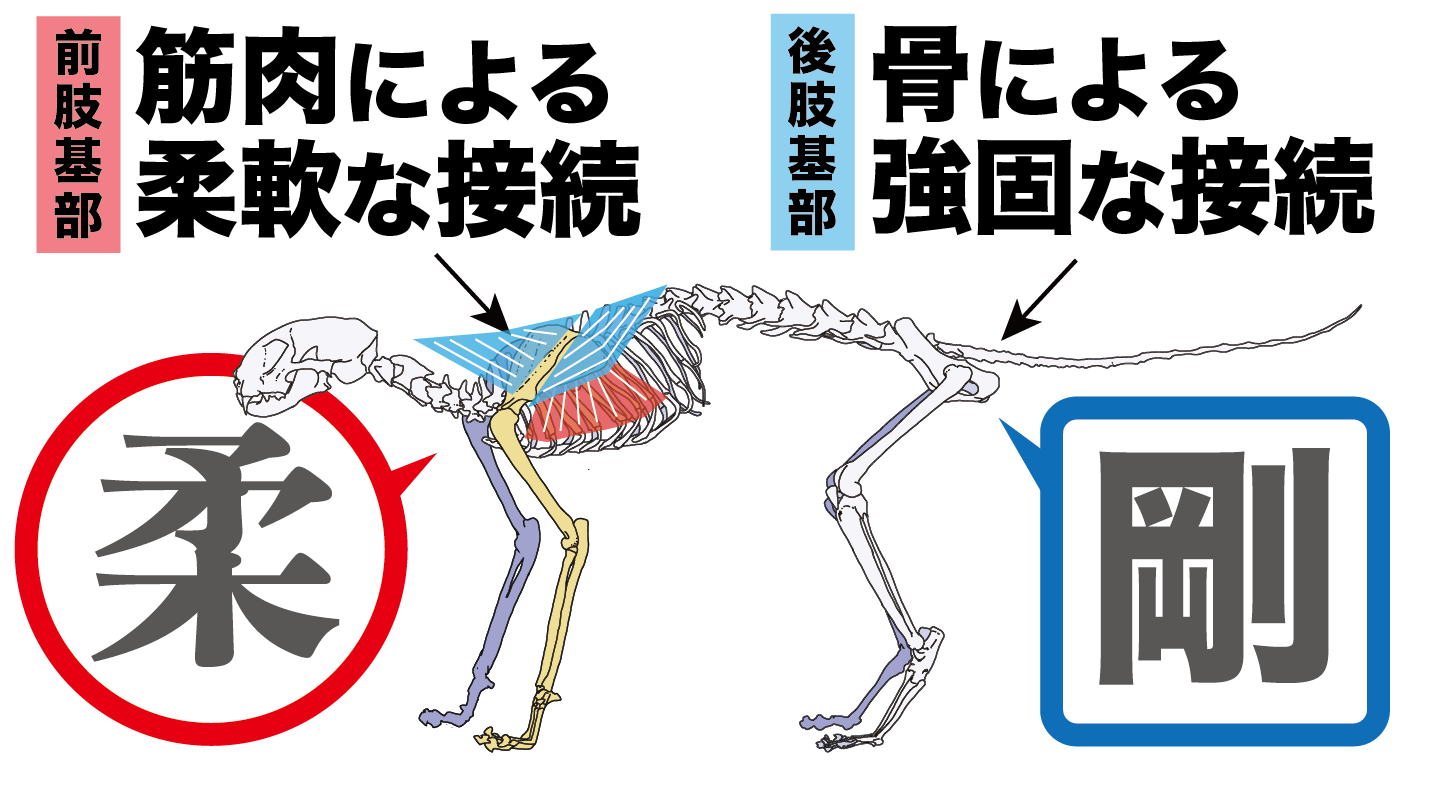
高速に疾走するチーターや断崖絶壁を走り回るユキヒョウなど,四脚動物は驚異的な運動能力は発揮する.本研究では動物の即時適応的な運動能力の源泉を,前肢基部にみられる脚と胴体の柔軟な接続様式から解き明かす.走行を得意とする動物では,後肢基部が球体関節を介して腰部に強固に接続される一方で,前肢基部は筋肉を介して胸部をハンモックのように吊り上げる柔軟な接続を有している.こうした前後脚の接続様式の差異には,従来のロボット工学から生まれた「硬い」ロボットには存在しない,動物が進化の過程を通して洗練させてきた「柔剛あわせ持つ身体のありよう」が凝縮されていると考えられる.動物が示す柔剛の統合様式を理解するために,本研究では,動物が示す多様な運動様式に呼応した肩部ハンモック構造の柔剛調節メカニズムの解明を目的とする.この目的達成のために,動物解剖学の視座に基づくロボット身体の構築と,自律分散制御の視座からの数理モデル化を用いた構成論的アプローチを展開する.