
B01-15:Motion Hacking により紐解く昆虫のしなやかな歩行制御戦略
概要
| 研究代表者 | 大脇 大(東北大学) |
|---|
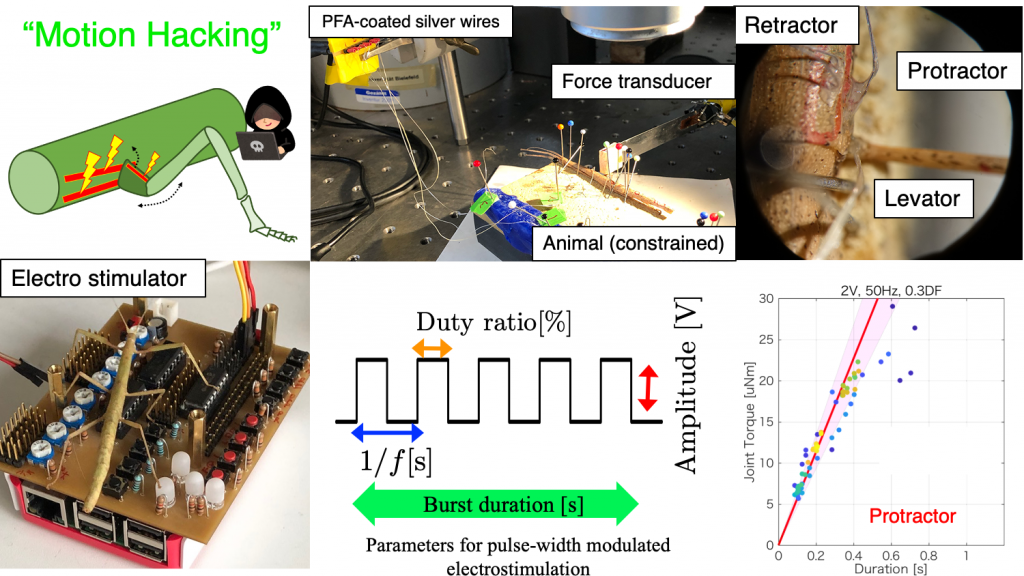 昆虫は,環境変化のみならず自身の身体構造が変化しても移動を可能とする適応能力を有している.このような昆虫の有する「しなやかな歩行制御戦略」は,脚間の運動を協調させることで移動を可能とする脚間協調制御が深く関わっているが,その機序解明には至っていない.本研究では,この現状を打破するため,研究代表者が開発したMotion Hacking法(昆虫自身の感覚運動機能を残存させた状態で,筋への電気刺激により,脚の運動をハッキングする方法)を用いる.介入者の意図通りに脚の運動を制御したときの昆虫自身の神経系による脚間協調過程を観察することで,その背後に隠れた歩行制御戦略を解明する.この能力の解明は,生物学に貢献するだけでなく昆虫にも比肩しうる能力を有するロボットの工学的実現への基盤技術となり,ソフトロボットの制御および知能化に資する,と考えている.
昆虫は,環境変化のみならず自身の身体構造が変化しても移動を可能とする適応能力を有している.このような昆虫の有する「しなやかな歩行制御戦略」は,脚間の運動を協調させることで移動を可能とする脚間協調制御が深く関わっているが,その機序解明には至っていない.本研究では,この現状を打破するため,研究代表者が開発したMotion Hacking法(昆虫自身の感覚運動機能を残存させた状態で,筋への電気刺激により,脚の運動をハッキングする方法)を用いる.介入者の意図通りに脚の運動を制御したときの昆虫自身の神経系による脚間協調過程を観察することで,その背後に隠れた歩行制御戦略を解明する.この能力の解明は,生物学に貢献するだけでなく昆虫にも比肩しうる能力を有するロボットの工学的実現への基盤技術となり,ソフトロボットの制御および知能化に資する,と考えている.