
B02-01 : Development of softrobotics in assisted reproductive technology
Summary
| Leader | Masashi Ikeuchi (The University of Tokyo) |
|---|
 Although assisted reproductive technology (ART) has enabled many couples who would otherwise be unable to conceive, the low pregnancy rate after embryo transfer (ET) remains as a serious problem. After ET, the embryo is floating or passively moving in the uterus, and likely to leave the area suitable for implantation, thus causing a failure of pregnancy or an ectopic pregnancy. Therefore, our purpose is to keep the embryo at the right position in the uterus after ET.
Although assisted reproductive technology (ART) has enabled many couples who would otherwise be unable to conceive, the low pregnancy rate after embryo transfer (ET) remains as a serious problem. After ET, the embryo is floating or passively moving in the uterus, and likely to leave the area suitable for implantation, thus causing a failure of pregnancy or an ectopic pregnancy. Therefore, our purpose is to keep the embryo at the right position in the uterus after ET.
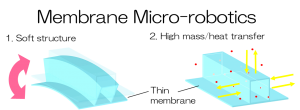
On the other hand, we have proposed and developed “membrane micro-robotics”, which is micro-scale robots composed of elastic membranes relatively thin compared to their feature size. The small thickness of the membrane enhances transport of heat and substances between the body and its surroundings, and it provides softness to the body, enabling passive and active morphological changes.
In this project, we apply our membrane micro-robotics technologies to develop a novel ET system composed of an embryo delivery sheet and a transvaginal carrier catheter with a hydraulic drive steerable tip. This minimally invasive system will increase the pregnancy rate and prevent ectopic pregnancy in ART.