
B01-14 : Development of a soft microswimmer powered by noise
Summary
| Leader | Takuji Ishikawa (Tohoku University) |
|---|
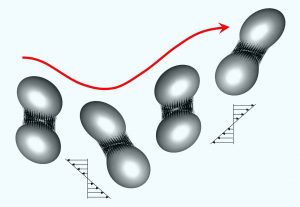
Artificial microswimmers have attracted the attention of many researchers due to their potential importance in engineering and medical applications. Most microswimmers are controlled by external forces in order to overcome the surrounding environments. In this study, on the other hand, we intend to develop a microswimmer powered by the surrounding environments with noise. This strategy in original, and the research field has not been explored so far. Due to small size of microrobots, the external flow field can be regarded as Stokes flow. Simple reciprocal body deformation cannot induce net migration in Stokes flow, as stated in the Scallop theorem. Hence, non-reciprocal body deformation is required for net propulsion. In this study, therefore, we develop a swimming principle of a soft microrobot in noisy shear flow, such as turbulent flow, by combining theory, experiment and simulation. The soft microswimmer would be utilized for extracting energy from noisy flow, generating net propulsion without external forces, and measuring the strength of noise.