
B01-14:ノイズで推進する柔らかいマイクロスイマーの開発
概要
| 研究代表者 | 石川 拓司(東北大学) |
|---|
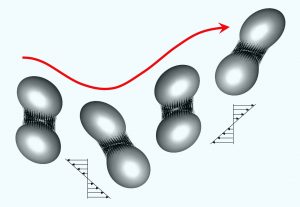 水中を遊泳するマイクロロボット(マイクロスイマー)は小型化が容易なため、医療や環境分野への応用が期待されている。従来のマイクロスイマーは、周囲の物理環境を克服して推進すべく設計・制御されてきた。本研究はこうした従来の研究哲学とは異なり、「環境ノイズを利用した新しい推進原理」を探求する。マイクロスイマーは小型であるため、周囲の流れ場は慣性を無視できるストークス流れと近似できる。ストークス流れ中は単純な往復運動では推進できず、非対称な変形が必須となる(帆立貝定理より)。本研究では、乱流のようなランダムなせん断応力場をエネルギー源として非対称に変形することで、乱れ中を所望の方向へと推進する柔らかい推進原理を開発する。数理と実験、数値シミュレーションを融合し、原理の実証に取り組む。ノイズを利用した推進が可能となれば、ノイズからエネルギーを取り出したり、外部からのエネルギー供給なく推進したり、ノイズの強さを計測するなどの応用展開が期待できる。
水中を遊泳するマイクロロボット(マイクロスイマー)は小型化が容易なため、医療や環境分野への応用が期待されている。従来のマイクロスイマーは、周囲の物理環境を克服して推進すべく設計・制御されてきた。本研究はこうした従来の研究哲学とは異なり、「環境ノイズを利用した新しい推進原理」を探求する。マイクロスイマーは小型であるため、周囲の流れ場は慣性を無視できるストークス流れと近似できる。ストークス流れ中は単純な往復運動では推進できず、非対称な変形が必須となる(帆立貝定理より)。本研究では、乱流のようなランダムなせん断応力場をエネルギー源として非対称に変形することで、乱れ中を所望の方向へと推進する柔らかい推進原理を開発する。数理と実験、数値シミュレーションを融合し、原理の実証に取り組む。ノイズを利用した推進が可能となれば、ノイズからエネルギーを取り出したり、外部からのエネルギー供給なく推進したり、ノイズの強さを計測するなどの応用展開が期待できる。
(研究期間:2021年9月まで)