
B01-12 : Mechanics and Synthesis of Soft Contact
Summary
| Leader | Shinichi Hirai (Ritsumeikan University) |
|---|
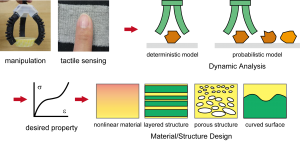 This research focuses on mechanics in soft contact with synthesis of materials and structures for soft contact. Soft contact implies mechanical interaction between the body of a soft robot and the environment around the robot. We will describe uncertainties of geometrical and physical properties probabilistically to formulate mechanical interaction in soft contact under uncertainties. Especially, we will focus on object manipulation performed by soft robotic hands and tactile perception vis soft sensors. We will design materials and structures of soft robotic hands and soft sensors for desired object manipulation and tactile sensing, with experimental validation using prototypes fabricated by three-dimensional printing or casting.
This research focuses on mechanics in soft contact with synthesis of materials and structures for soft contact. Soft contact implies mechanical interaction between the body of a soft robot and the environment around the robot. We will describe uncertainties of geometrical and physical properties probabilistically to formulate mechanical interaction in soft contact under uncertainties. Especially, we will focus on object manipulation performed by soft robotic hands and tactile perception vis soft sensors. We will design materials and structures of soft robotic hands and soft sensors for desired object manipulation and tactile sensing, with experimental validation using prototypes fabricated by three-dimensional printing or casting.