
B01-11 : Development of autonomously actuating living soft bio-robots
Summary
| Leader | Kazuya Furusawa (Fukui University of Technology) |
|---|
 Because of demands in the fields of biology, pharmacology, and regenerative medicine, there have been various challenges for reproducing mechanisms of locomotor apparatus into cell culture vessels. In the challenges, researchers have developed various engineered muscle tissues. The engineered muscle tissues could contract by an electro-stimulation. The engineered muscle tissues constructed of muscle cells and soft biomaterials, such as collagen hydrogels and fibrin hydrogels. Therefore, the elastic moduli of the engineered muscle tissues range from 100 Pa to 10 kPa. By contrast, a contraction force of engineered muscle tissues is extremely weak (~N). Therefore, the engineered muscle tissues could be regarded as the extremely soft actuators which could generate extremely weak forces. By using it, we could develop the extremely soft-robots which has a jellyfish-like softness. However, electro-stimulation devices are required to actuate the engineered muscle. In addition, we should fix the engineered muscle to the electrodes of electro-stimulation devices. Therefore, the actuation of engineered muscle is limited.
Because of demands in the fields of biology, pharmacology, and regenerative medicine, there have been various challenges for reproducing mechanisms of locomotor apparatus into cell culture vessels. In the challenges, researchers have developed various engineered muscle tissues. The engineered muscle tissues could contract by an electro-stimulation. The engineered muscle tissues constructed of muscle cells and soft biomaterials, such as collagen hydrogels and fibrin hydrogels. Therefore, the elastic moduli of the engineered muscle tissues range from 100 Pa to 10 kPa. By contrast, a contraction force of engineered muscle tissues is extremely weak (~N). Therefore, the engineered muscle tissues could be regarded as the extremely soft actuators which could generate extremely weak forces. By using it, we could develop the extremely soft-robots which has a jellyfish-like softness. However, electro-stimulation devices are required to actuate the engineered muscle. In addition, we should fix the engineered muscle to the electrodes of electro-stimulation devices. Therefore, the actuation of engineered muscle is limited.
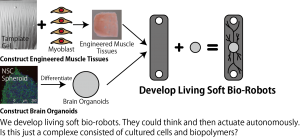
In this research, therefore, we will construct “living soft bio-robots” which autonomously actuate without any electro-stimulating devices. Previously, Dr. Furusawa developed collagen hydrogels with anisotropic multichannel structures and anisotropic fiber alignments (Multi-Channel Collagen Gel: MCCG). By using the anisotropic structures as a template, we construct the engineered muscle tissues which have anisotropic muscle fiber structures. Then, we functionally connect a brain organoid to the anisotropic engineered muscle tissues. The brain organoid can regulate the actuating behaviors of the engineered muscle. Therefore, the engineered tissue complexes can be regarded as the living bio-robots. By using the living bio-robots, we elucidate the acquisition mechanism of autonomous movement of animals.