
B01-10 : Decentralized control system including biological emergence Adapted to Peristaltic Motion Based on Bio-Inspired Soft Robotics
Summary
| Leader | Taro Nakamura (Chuo University) |
|---|
 The purpose of this research is to establish a control system that can adapt flexibly to changes in the external environment for a peristaltic drive system.
The purpose of this research is to establish a control system that can adapt flexibly to changes in the external environment for a peristaltic drive system.
In particular, in this theme, we apply a decentralized control system including biological emergence to the peristaltic pump based on the transport and mixing function of the intestine peristaltic and examine its effectiveness.
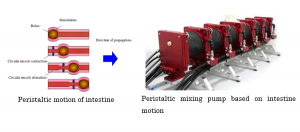
Peristaltic motion is a non-skeletal drive system in an annular shape as seen in the digestive system of the human body and the movement method of earthworms. It mainly refers to movement and transport means induced by expansion / contraction motion to axial and radial direction.
In particular, the intestine is caused peristalsis by contraction of two types of smooth muscle (circular muscle and longitudinal muscle), and efficiently transports an excrement that is a high viscosity, solid-liquid mixed phase flow “in a soft and supple” manner. In addition, the intestine has innumerable sensory organs and nerves are dispersed in the duct, and are called the “second brain”. However, the transport and mixing mechanisms have not been fully elucidated.
On the other hand, we developed a peristaltic mixing pump using a soft actuator. This mixing pump can be transported Solid-liquid mixture, high viscous fluid and powder in vertical. Further, powder and liquid can be mixed or separated efficiency. Hence this device is expected to apply various fields such as food production, construction industry.
In this research, we will establish the correlation between complicated operation parameters and the flow of the transported fluid by applying decentralized control system including emergence control to peristaltic mixing pump.