
B01-05 : Development of High-Durable Flexible Fabrics using High-Strength Synthetic Fibers and its Application to Soft Robot Mechanisms
Summary
| Leader | Gen Endo (Tokyo Institute of Technology) |
|---|
 Although soft robots have great possibilities which can not be achieved by conventional rigid structure robots, most of the researches are remaining in laboratories as prototypes, and its practical use is very limited. One of the most dominant reasons is the low durability of the soft materials because softness is achieved by a large elastic and/or plastic elongation of the soft material itself.
Although soft robots have great possibilities which can not be achieved by conventional rigid structure robots, most of the researches are remaining in laboratories as prototypes, and its practical use is very limited. One of the most dominant reasons is the low durability of the soft materials because softness is achieved by a large elastic and/or plastic elongation of the soft material itself.
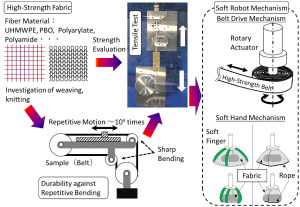
This research investigates a high-durable flexible fabric that can structurally deform without relying on material elongation and its application to soft robot mechanisms. We will create various flexible fabrics that possess different tensile-strain relationships by applying various types of weaving and knitting. Moreover, high-strength and high-durable fabric against repetitive bending will be achieved by using high-strength synthetic fibers. Finally, we will implement this fabric to soft robot mechanisms as a member of structural parts, and prove the effectiveness of the proposed method.
Our research group has already investigated the basic properties of various synthetic fiber ropes and developed various wire-driven mechanisms using synthetic fiber ropes, such as a quadruped robot and a long-reach multi-joint manipulator. This research extends our knowledge from a one-dimensional linear structure to a two-dimensional planar structure.