
B01-02 : Development of biohybrid soft robots powered by skeletal muscle tissues
Summary
| Leader | Yuya Morimoto (The University of Tokyo) |
|---|
Skeletal muscle tissue, with its softness and self-healing properties, is expected as a driving source of a soft robot aiming to reproduce soft motion possessed by a living body. However, since the actuating performance of skeletal muscle depends on the balance of forces with its surrounding structures, a soft robot powered with skeletal muscle tissues cannot generate large motions by merely mounting the skeletal muscle tissues on a soft substrate. In living body such as animal’s tail and the human face, multiple skeletal muscles are arranged to antagonize concentrically. Therefore, in this research plan, we aim to understand the principle of soft motions driven by skeletal muscles and to establish the design theory and control theory of soft robots using skeletal muscle tissues.
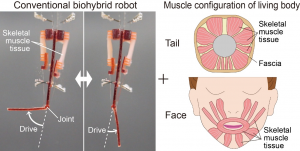
We have established the method for construction of biohybrid robots composed of the robot skeleton with a joint and antagonistic pair of skeletal muscle tissues. Expanding this technology to soft robotics, in this study, we will establish (i) a method of constructing a drive system consisting of multiple antagonistic skeletal muscle tissues arranged concentrically, (ii) a control method for driving skeletal muscle tissues, and (iii) a method of reproducing the motion of the tail and face by skeletal muscle tissues. Through these researches, we will work on systematic understanding including the design and control theory of soft robots driven by skeletal muscle tissues.