
Interdisciplinary Collaborative Talks: ICRA2020 Workshop “Beyond Soft Robotics”
Vito Cacucciolo (EPFL, Switzerland) & Shingo Maeda (Shibaura Inst. Tech, Japan)



A stretchable pump for the next generation of soft robots
Stretchable pumps are a class of electrically-driven pumps with an entirely flexible or even stretchable body. By integrating these pumps in soft robots’ design, we can finally cut the fluidic tether and enable mobile and wearable applications. These pumps rely on ElectroHydroDynamics, a solid-state mechanism that accelerates liquid molecules using electric fields, resulting in silent bi-directional operation. We report first applications into untethered soft robots, fluidic muscles for soft exoskeletons, and smart textiles with active temperature management. In this talk we will report how collaborations between researchers from different backgrounds and fields have been instrumental to develop this groundbreaking technology, which will change how soft robots are made.
Vito Cacucciolo received the Laurea degree (with honors) from Politecnico di Bari, Bari, Italy and the M.Sc. from NYU Tandon School of Engineering, New York, NY, USAvin 2013 and the Ph.D. in biorobotics from Sant’Anna School of Advanced Studies, Pisa, Italy, in 2017. He is currently working as a scientist in the Soft Transducers Lab of EPFL. His research interests include untethered and wearable soft robotics and soft grippers.
Shingo Maeda received his Dr. Eng. degrees in applied physics from Waseda University, Tokyo, Japan. He has been an Associate Professor with the Department of Engineering Science and Mechanics, Shibaura Institute of Technology, Tokyo, Japan. He was a visiting professor at Scuola Superiore Sant’Anna (Prof. Cecilia Laschi) from 2015 to 2016. His main research topics include smart gels, soft actuators, and chemo-mechanical systems.
Subramanian Sundaram (Boston University & Wyss Institute, Harvard University, USA) & Petr Kellnhofer (MIT, USA)



Learning how to use tactile information from human interactions
Empowering robots with human level dexterity has proved to be a substantial hurdle for long. Humans rely on tactile feedback from mechanoreceptor networks, that are hard to recreate in robots and prosthetics. Emerging computer vision based robot grasping approaches have benefited from easy access to abundant visual data and new machine learning tools. However, there are no scalable tactile sensing platforms to acquire large-scale tactile datasets. Therefore, how humans utilize the collective set of tactile signals to grasp, identify and weigh objects as well as infer object properties is still unknown. We present a low-cost, scalable tactile glove and deep convolutional neural networks to show that sensors uniformly distributed over the hand can be used to identify objects, estimate weights and understand the tactile signatures of the human grasp. The tactile glove consists of a piezoresistive film connected by an array of conductive thread electrodes, and assembled on a knitted glove. We then record a large-scale tactile dataset with 135,000 frames, each covering the full hand while interacting with 26 different objects, using this hardware. Deep convolutional neural networks trained on this dataset offer insights into the tactile signals involved in the human grasp as seen through the lens of a scalable tactile platform that can be readily adapted to future robots and prosthetics.
Subramanian Sundaram is an American Heart Association (AHA) Postdoctoral Fellow at Boston University and the Wyss Institute for Biologically-Inspired Engineering at Harvard University. His research bridges robotics and tissue engineering. Currently, he studies vascular networks and cardiac tissue mechanics at Prof. Chris Chen’s Tissue Microfabrication Lab. He received his Ph.D. in Electrical Engineering & Computer Science at MIT, CSAIL in 2018 working with Prof. Wojciech Matusik. Previously, he received his B.E. degrees in Electrical Engineering and Mechanical Engineering at the Birla Institute of Technology and Science, India. He completed his undergraduate theses at Prof. Herbert Shea’s and Prof. Klaus Kern’s groups at the EPFL and the Max Planck Institute for Solid State Research respectively. (http://subrasundaram.com)
Petr Kellnhofer completed his PhD at the Max-Planck Institute for Informatics in Germany under the supervision of Prof. Hans-Peter Seidel and Prof. Karol Myszkowski. His thesis on the perceptual modeling of human vision for stereoscopy was awarded the Eurographics PhD award. He then joined the group of Prof. Wojciech Matusik at MIT CSAIL as a postdoc focusing on topics related to human sensing such as eye tracking and tactile feedback. He is now a visiting scholar in Prof. Gordon Wetzstein’s group at Stanford university. His current research interests cover a range of topics from both computer graphics and computer vision related to human sensing as well as perceptually-motivated computational imaging using neural networks. (http://kellnhofer.xyz)
Francesco Giorgio-Serchi (U. Edinburgh, UK) & Hiromi Mochiyama (University of Tsukuba, Japan)


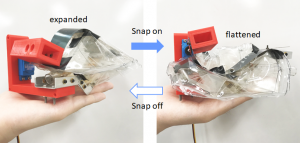
A pulsed pump by snap-through actuation
Recent work on cephalopods (i.e. squids and octpuses) has shown that such aquatic organisms can perform a range of outstanding swimming performances. This is thank to their capability to deform their body while at the same time exploiting the inherent elasticity of their muscular tissues. Lately ,significant insight has been derived on what the critical dynamics are which enable these organisms to sport such outstanding swimming skills. However, replicating their abrupt shape change and elasticity remains a significant challenge if we resort to traditional mechanical design principles. Here we propose the use of bistable systems in the form of snap-through mechanisms to exploit the sharp gradients of elastic pontential energy for the purpose of generating sudden deformations and, in this way, mimicking the aggressive dynamics of these organisms.
Francesco Giorgio-Serchi is a Lecturer and Chancellor’s Fellow at the University of Edinburgh. His work encompasses the design soft unmanned underwater vehicles. Previously he was a Research Fellow at the University of Southampton, within the Fluid-Structure-Interaction group, where he studied the role of shape variations of aquatic systems for the enhancement of maneuverability and propulsive efficiency. Prior to that he was at the Centre for Sea Technologies and Marine Robotics of the Scuola Superiore Sant’Anna, Italy, where he worked on the design of soft-bodied, bioinspired, aquatic vehicles. Dr. Giorgio-Serchi holds an MSc from the University of Pisa, Italy, in Marine Technologies and a PhD in Computational Fluid Dynamics from the Centre for CFD of the University of Leeds, UK.
Hiromi Mochiyama is currently a professor of the University of Tsukuba, Japan. He received the B.E. and M.E. degrees from Waseda University, Tokyo, Japan, in 1993 and 1995, respectively, both in electrical engineering, and the Doctoral degree in information science from the Japan Advanced Institute of Science and Technology (JAIST), Hokuriku, Japan, in 1998. After working with the Department of Information Science of JAIST, the Department of Mechanical System Engineering of National Defense Academy of Japan, and the Department of Mechanical Engineering of Nagoya Institute of Technology, Japan, he joined the Faculty of the University of Tsukuba in 2007 as an Associate Professor in the Department of Intelligent Interactive Technologies. Since then, he has directed the Flexible Robotics Laboratory. His research interests include system and control theory of soft robotics and haptics technology. From 2010 to 2011, he served as Deputy Director of the Bureau of Science, Technology and Innovation Policy, Cabinet Office, Japan. He served/is serving as the finance chair of ICRA2009, IROS2013, IROS2022, IFAC2023 etc., and the program chair of ARSO2020. He has been a senior editor of the IROS Conference Paper Review Board since 2018.
Cosimo della Santina (DLR&TUM, Germany) & Ryan Truby (MIT, USA)



Tackling Brain-Body Challenges through Robotics-Materials Collaboration
Soft robotics embodies an auspicious new paradigm for creating robots with improved resilience, adaptability, safety, and more by endowing robot bodies with compliance and deformability. However, the material nature of soft robots complicates their control in two key ways. First, the continuum mechanics of soft robots suggests that control strategies for these systems lies beyond traditional model-based planning and control approaches. Second, designing and fabricating soft matter-based bodies for these robots that enable integrated actuation and biomimetic sensing capabilities remains non-trivial. In short, the challenge of soft robotic perception and control are both a robotics and a materials engineering one. In this tag team presentation, we will provide a brief history of how a roboticist and a materials engineering are working together to tackle “brain-body” challenges in soft robotics. After brief overviews of our disciplinary efforts in addressing “brain” and “body” centric problems for the field through advances in control, bioinspired design, soft sensing materials, and 3D printing, we will share our latest collaborative efforts at the materials-robotics interface to use deep learning-based frameworks to address challenges in the control of soft, sensorized robots. Overcoming the “brain-body” challenges in soft robotics will require interdisciplinary solutions, and we hope to share how collaborations like ours can help the next-generation of soft robots reach their full potential.
Cosimo Della Santina received the B.S. degree in computer engineering (cum laude, 2011), the M.S. degree (cum laude, 2014) in automation and robotics engineering, and the PhD in robotics (cum laude, 2019), all from University of Pisa, Italy. He was a Visiting PhD student and a post doc (2017 to 2019) of the Computer Science and Artificial Intelligence Laboratory, Massachusetts Institute of Technology, Cambridge, MA, USA. Since 2020, he is post doc at the department of Mathematics and Informatics, Technical University of Munich, Germany. He also holds an affiliation to the German Aerospace Centre (DLR). His main research interests include (i) Modelling for Control and Model Based Control of Soft Robots, (ii) Combining Machine Learning and Model Based Strategies with application to soft robotics, (iii) Soft Robotic Hands. He was awarded with the “Fabrizio Flacco” Young Author Award of the RAS Italian chapter (2019), and he is finalist of the EuRobotics Georges Giralt Ph.D. Award (2020). He has published more than 40 papers on international journals, books, and refereed conferences.
Ryan Truby is a Postdoctoral Fellow at MIT’s Computer Science and Artificial Intelligence Lab working on the design, fabrication, and control of soft robots. He is currently developing new materials and manufacturing strategies for creating sensorized soft robots as well as deep learning-based frameworks for their control. Before MIT, Ryan received his Ph.D. in Applied Physics from Harvard University in 2018, where he developed 3D printing strategies for fabricating novel soft robotic systems, such as the entirely soft, hardware-free Octobot he developed as part of a collaboration at Harvard’s John A. Paulson School of Engineering and Applied Science and Wyss Institute. His research also includes work in 3D printed vascularized tissue constructs, soft electronics, and artificial muscles. Ryan’s work has been supported by a National Science Foundation Graduate Research Fellowship and a Schmidt Science Fellowship, and he has received the Outstanding Paper Award at the 2019 IEEE International Conference of Soft Robotics (RoboSoft) and the Gold Award for Graduate Students from the Materials Research Society.