
計画研究
A01班 しなやかな身体
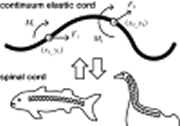
A01-1:弾性連続体の動的ふるまいの解明とバイオメカニクス融合
- 研究代表者
- 新山 龍馬(明治大学)
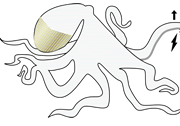
A01-2:生物の自己改変能力を実装するバイオソフトロボティクス
- 研究代表者
- 清水 正宏(大阪大学)
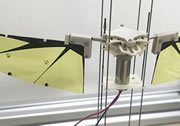
A01-3:微細構造を活用した生物のやわらかい飛翔と遊泳の原理解明と実装
- 研究代表者
- 田中 博人(東京工業大学)
A02班 しなやかな動き
A02-1:弾性グラディエントナノ薄膜を利用した自由変形可能な太陽電池の創成
- 研究代表者
- 福田 憲二郎(理化学研究所)

A02-2:イオン交換膜が実現するソフトロボットのモーションコントロール
- 研究代表者
- 鈴森 康一(東京工業大学)

A02-3:超柔軟素材を用いた分岐・伸展トーラス機構を基軸とするロボット駆動体の設計と具現化
- 研究代表者
- 多田隈 建二郎(東北大学)
A03班 しなやかな知能
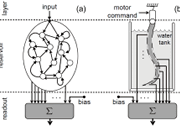
A03-1:やわらかいダイナミクスとフレキシブルセンサー技術の融合による情報処理限界の突破
- 研究代表者
- 中嶋 浩平(東京大学)

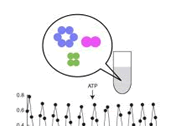
A03-2:ストカスティックマシンの創成を通じたソフトロボティクスの攻究
- 研究代表者
- 前田 真吾(東京工業大学)
A03-3:コントローラブルな生物リズム・パターンの創成
- 研究代表者
- 伊藤 浩史(九州大学)