
B01-12:ソフトコンタクトの力学と創成
概要
| 研究代表者 | 平井 慎一(立命館大学) |
|---|
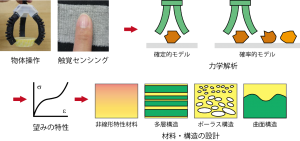 本研究では、ソフトロボットの身体と環境との接触を、ソフトコンタクトと称し、ソフトコンタクトの力学を解明するとともに、望ましいソフトコンタクトを生み出すための材料と形態を明らかにする。対象物の幾何学的形状や物理特性の不確定性を確率的に表現し、不確定性環境下におけるソフトコンタクトの力学を定式化する。ソフトハンドによる物体操作とソフト触覚センシングを対象として、ソフトコンタクトにおける力学を定式化する。ソフトコンタクトにおける望ましい系の挙動を実現するために、フィンガーやセンサの材料と形態の設計を試み、三次元プリンタやキャスティングによる試作を通してその有効性を実験的に検証する。
本研究では、ソフトロボットの身体と環境との接触を、ソフトコンタクトと称し、ソフトコンタクトの力学を解明するとともに、望ましいソフトコンタクトを生み出すための材料と形態を明らかにする。対象物の幾何学的形状や物理特性の不確定性を確率的に表現し、不確定性環境下におけるソフトコンタクトの力学を定式化する。ソフトハンドによる物体操作とソフト触覚センシングを対象として、ソフトコンタクトにおける力学を定式化する。ソフトコンタクトにおける望ましい系の挙動を実現するために、フィンガーやセンサの材料と形態の設計を試み、三次元プリンタやキャスティングによる試作を通してその有効性を実験的に検証する。