
B01-11:自律した運動を行う生きたバイオロボットの開発
研究代表者
概要
| 研究代表者 | 古澤 和也(福井工業大学) |
|---|
 運動の仕組みの解明や新しい薬の前臨床試験、そして再生医療の実現を目的として、運動器官の仕組みを培養容器中に再現しようとする研究が数多く報告されている。これらの研究では、細胞と生体材料を組み合わせるなどの方法で、筋組織を再構築した再生筋組織が使用されている。再生筋組織は、外部から電気刺激を与えることで収縮運動を行う能力を持っている。再生筋組織の多くは細胞とコラーゲンゲルなどの極めてやわらかい物質でできており、その弾性率はおよそ数百Paから数十Paである。筋収縮によって生じる力もμNレベルであり、微弱である。したがって、再生筋組織は、微弱な力を生じることが可能な極めてやわらかいアクチュエーターとして位置づけることができる。このようなやわらかなアクチュエーターを組み合わせれば、クラゲのようなやわらかさを極めたロボットをつくることができると期待できる。しかし、上述のように、再生筋組織の筋収縮には外部から刺激を印加する装置が必要であり、特殊な培養容器が必要となったり、さらには再生筋組織を培養容器中に固定する必要があったりと制限が多い。
運動の仕組みの解明や新しい薬の前臨床試験、そして再生医療の実現を目的として、運動器官の仕組みを培養容器中に再現しようとする研究が数多く報告されている。これらの研究では、細胞と生体材料を組み合わせるなどの方法で、筋組織を再構築した再生筋組織が使用されている。再生筋組織は、外部から電気刺激を与えることで収縮運動を行う能力を持っている。再生筋組織の多くは細胞とコラーゲンゲルなどの極めてやわらかい物質でできており、その弾性率はおよそ数百Paから数十Paである。筋収縮によって生じる力もμNレベルであり、微弱である。したがって、再生筋組織は、微弱な力を生じることが可能な極めてやわらかいアクチュエーターとして位置づけることができる。このようなやわらかなアクチュエーターを組み合わせれば、クラゲのようなやわらかさを極めたロボットをつくることができると期待できる。しかし、上述のように、再生筋組織の筋収縮には外部から刺激を印加する装置が必要であり、特殊な培養容器が必要となったり、さらには再生筋組織を培養容器中に固定する必要があったりと制限が多い。
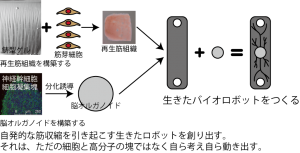
そこで、本研究では、やわらかいアクチュエーターである再生筋組織に、やわらかい制御装置である脳オルガノイドを組み合わせることで、自律して運動する生きたバイオロボットをつくりだす。さらに、バイオロボットが運動する能力を獲得する仕組みを解明することで、生き物の自発的な運動が先天的に備わっている物なのか、それとも学習によって獲得するものなのかを解明する。
以上を実現するために、研究代表者が独自に開発した一定方向に配列した多管構造を持つコラーゲンゲル(マルチチャネルコラーゲンゲル:MCCGを用いて、筋線維が配向している再生筋組織を構築する。この再生筋組織と脳オルガノイドを機能的に接続することで、外部からの電気刺激を必要としない自律して運動するバイオロボットをつくりだす。