
B01-05:高強度化学繊維による高耐久柔軟布の開発とソフトロボット機構への応用
概要
| 研究代表者 | 遠藤 玄(東京工業大学) |
|---|
 構造体そのものが柔らかいソフトロボットは、従来の硬い素材・リンク系では成し得ない様々な可能性を秘めているが、一方で従来研究の多くが実験室レベルに留まり実用化に至ったものは稀である。その最大の理由は素材そのものが伸縮することにより大きなひずみを生じ、これにより素材が劣化し,耐久性が低くなるためであると考えている。
構造体そのものが柔らかいソフトロボットは、従来の硬い素材・リンク系では成し得ない様々な可能性を秘めているが、一方で従来研究の多くが実験室レベルに留まり実用化に至ったものは稀である。その最大の理由は素材そのものが伸縮することにより大きなひずみを生じ、これにより素材が劣化し,耐久性が低くなるためであると考えている。
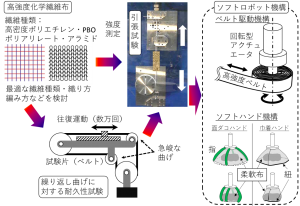
本研究では、素材そのものは伸縮せずに大変形を実現可能な柔軟布を、ソフトロボットの構造材として用いることを検討する。布の織り方・編み方を選択することにより。多様な荷重-ひずみ特性を有する柔軟布を実現する。そして高強度化学繊維を用いることで大きな力に耐えることができ、なおかつ繰り返し曲げに対して十分実用的な耐久性を実現する。さらにこの布を用いてベルト駆動機構・ソフト把持機構を開発し、提案した構成法の有効性を検証する。
現在までに高強度化学繊維を用いたワイヤ駆動機構の研究開発を行い、基礎的諸特性を明らかにし、これを用いた四脚歩行ロボット・長尺多関節アームを開発してきたが、本研究では今までに得られた基礎的諸特性の知見を、一次元の線状のワイヤから二次元の面上の布構造へと拡張する研究である。