
B01-02:骨格筋組織を駆動源とするバイオソフトロボットの創成
概要
| 研究代表者 | 森本 雄矢(東京大学) |
|---|
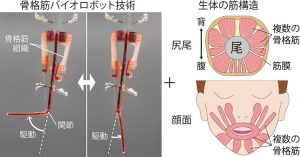 生体が有する柔らかな動きの再現を目指したソフトロボットの駆動源として、柔らかさと増殖による自己再生能を持つ筋組織の使用が期待されている。しかし、骨格筋組織は周囲の構造体との力の釣り合いによって、その駆動性を変えてしまうため、柔らかな基板上に骨格筋組織を設けるだけでは大きく駆動することはできない。一方、動物の尻尾やヒトの顔の柔らかな動作に着目すると、複数の骨格筋が同心円状に拮抗するように配置されている。この配置原理を模倣することで、骨格筋組織でも柔らかな動きを実現可能になると考えている。そこで本研究計画では生体で実現されている骨格筋を駆動源とする柔らかな動きの原理を理解し、骨格筋組織を用いたソフトロボットの設計論および制御論の確立を目指す。
生体が有する柔らかな動きの再現を目指したソフトロボットの駆動源として、柔らかさと増殖による自己再生能を持つ筋組織の使用が期待されている。しかし、骨格筋組織は周囲の構造体との力の釣り合いによって、その駆動性を変えてしまうため、柔らかな基板上に骨格筋組織を設けるだけでは大きく駆動することはできない。一方、動物の尻尾やヒトの顔の柔らかな動作に着目すると、複数の骨格筋が同心円状に拮抗するように配置されている。この配置原理を模倣することで、骨格筋組織でも柔らかな動きを実現可能になると考えている。そこで本研究計画では生体で実現されている骨格筋を駆動源とする柔らかな動きの原理を理解し、骨格筋組織を用いたソフトロボットの設計論および制御論の確立を目指す。
我々はこれまでに骨格筋組織と関節付きロボット骨格を統合した骨格筋バイオロボットの構築技術を確立している。この技術をソフトロボット学へと展開し、本研究では、①同心円状に配置された拮抗する複数の骨格筋組織から成る駆動系の構築法の確立、②骨格筋組織駆動系の駆動制御法の確立、③骨格筋組織による尻尾や顔面の動作再現法の確立、の3項目の解明を実現する。これらを通じて、骨格筋組織を駆動源とするソフトロボットの設計・制御論を含む体系的理解に取り組む。