
B01-09 : Development of a thermally stimulated light-weight coiled- actuator: Overcome the limits of large displacement and high output with low power consumption
Summary
| Leader | Yasuhiko Hayashi (Okayama University) |
|---|
 With a motive to solve the issue of an aging population and low birth rates, there is a demand for development of soft actuators that contribute to the progress of humanoid robots and androids, which pursues flexibility and adaptability to bending infinitely. It is self-evident that the soft actuators are required to have high output with significant expansion and contraction, and how to realize them in “light-weight” is considered necessary in practical use.
With a motive to solve the issue of an aging population and low birth rates, there is a demand for development of soft actuators that contribute to the progress of humanoid robots and androids, which pursues flexibility and adaptability to bending infinitely. It is self-evident that the soft actuators are required to have high output with significant expansion and contraction, and how to realize them in “light-weight” is considered necessary in practical use.
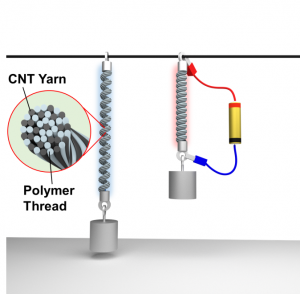
In this study, Joule heat generated by applying low power consumption to minuscule carbon nanotube (CNT) yarn (hard material) is used as an external thermal stimulation source, and a thin super flexible polymer thread (soft material) is used as the material for actuation motion. Two yarns are coiled together by controlling the interface to realize a revolutionary composite fiber coiled actuator, in which a polymer thread is contracted at high speed by heat. Considering of implementation to wearable equipment, we realize the feature of operating temperature at 100 oC, less than 60 oC the feature, large stretchability (large displacement), high output (high workload), high ability to adapt to motion (free motion), and not using a heavy metal heat source, which is the key to weight reduction.
The research representatives have established technology of producing high strength, and flexible CNT spun yarn by continuous dry spinning from tall and high-density CNT array substrate. With making full use of this technology, this research focuses on the development of crystalline polymer, and essential technologies of nanostructure, process and shape control of composite fiber with CNT. Furthermore, a heat dissipation suppression structure is proposed to establish necessary expertise for efficient heat conduction mechanism to a polymer thread from CNT yarn. This research promotes knowledge exchange in interdisciplinary in the field of soft robotics.