
B01-08 : Soft integration mechanism of exoskeleton and muscle unveiling through the evolution of ultrafast movements
Summary
| Leader | Katsushi Kagaya (Kyoto University) |
|---|
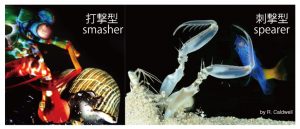 Biological organisms exist through evolution, which can be said a natural process of ‘try and error’. In the arthropods in the exoskeleton, several species performing ‘ultrafast’ movements impossible with the direct muscle contraction, but possible with the exoskeletal spring, evolved at distant positions in the evolutionary tree. The stomatopod is one of the groups performing the movement. They are categorized into two groups (spearers and smashers). The spearers stub the soft fish. The smashers break the hard seashells. Both of the groups utilize the spring, but smashers move ~seven times faster than spearers. The spears are morphologically closer to the ancestral species. Therefore, in evolutionary history, the smashers are considered to evolve by changing the relationship of the muscle and exoskeleton. In this study, I aim to elucidate the relationship by comparative physiology(experiment of muscle physiology) and informatics (analysis by information theoretic measures) and extract the design principles of the muscle and softly deforming skeleton from the fruit of the evolution.
Biological organisms exist through evolution, which can be said a natural process of ‘try and error’. In the arthropods in the exoskeleton, several species performing ‘ultrafast’ movements impossible with the direct muscle contraction, but possible with the exoskeletal spring, evolved at distant positions in the evolutionary tree. The stomatopod is one of the groups performing the movement. They are categorized into two groups (spearers and smashers). The spearers stub the soft fish. The smashers break the hard seashells. Both of the groups utilize the spring, but smashers move ~seven times faster than spearers. The spears are morphologically closer to the ancestral species. Therefore, in evolutionary history, the smashers are considered to evolve by changing the relationship of the muscle and exoskeleton. In this study, I aim to elucidate the relationship by comparative physiology(experiment of muscle physiology) and informatics (analysis by information theoretic measures) and extract the design principles of the muscle and softly deforming skeleton from the fruit of the evolution.