
B01-07 : Development of Three-Dimensional Shape Controllable Soft-actuators using PVC gel
Summary
| Leader | Minoru Hashimoto (Shinshu University) |
|---|
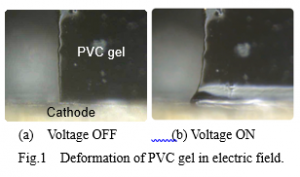 Plasticized polyvinyl chloride (PVC) gel which has a large deformation by applying voltage and high driving stability in air is considered as a suitable candidate material for development of soft-actuator. Utilizing the electrical properties, we have developed several soft-actuators using PVC gel which shows one-dimensional deformation such as an expansion-contraction behavior in an electric field. In this study, we will fabricate novel soft-actuators using PVC gel having three-dimensional deformation which allows for soft-robotics applications.
Plasticized polyvinyl chloride (PVC) gel which has a large deformation by applying voltage and high driving stability in air is considered as a suitable candidate material for development of soft-actuator. Utilizing the electrical properties, we have developed several soft-actuators using PVC gel which shows one-dimensional deformation such as an expansion-contraction behavior in an electric field. In this study, we will fabricate novel soft-actuators using PVC gel having three-dimensional deformation which allows for soft-robotics applications.
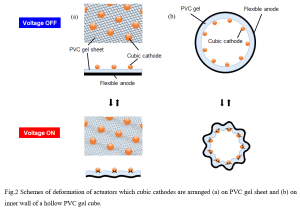 This study is expected to contribute to produce the soft-robots changing the shape flexibly which is similar with the living body movement via cooperation with A02 team. First, we need to consider some configuration methods of the soft-actuators which deform into the required shapes. Fabricating the soft-actuators which can deform into predicted curvilinear surfaces by using cylindrical and/or cubic electrodes, we expect to establish the configuration technology of soft-actuator which can deform flexibly in three dimensions.
This study is expected to contribute to produce the soft-robots changing the shape flexibly which is similar with the living body movement via cooperation with A02 team. First, we need to consider some configuration methods of the soft-actuators which deform into the required shapes. Fabricating the soft-actuators which can deform into predicted curvilinear surfaces by using cylindrical and/or cubic electrodes, we expect to establish the configuration technology of soft-actuator which can deform flexibly in three dimensions.