
A01-3:微細構造を活用した生物のやわらかい飛翔と遊泳の原理解明と実装
研究チーム
| 研究代表者 | 田中 博人(東京工業大学) |
|---|---|
| 研究分担者 | 中田 敏是(千葉大学) |
| 山崎 剛史(山階鳥類研究所) | |
| 研究協力者 | 菊地デイル万次郎(東京工業大学) |
概要
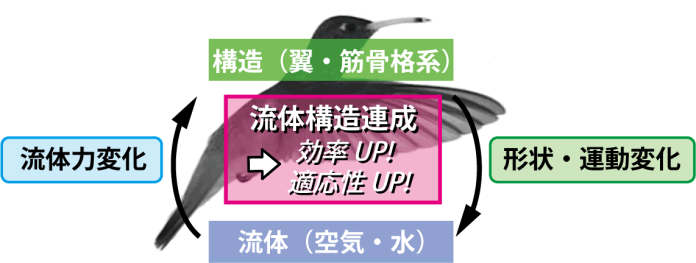 ソフトロボット学は、ソフトな体でたくみに運動する生物に着想を得ている。特に飛行生物と遊泳生物では、体の形状が自身に働く流体力を生み、その流体力がソフトな体を変形させるという、流体と構造の連成が起きている。その極限的デザインは、激しく振動する羽ばたき翼および羽ばたき筋骨格系に見ることができ、そこでは複雑で微細な構造が活用されている。本研究計画では、生物の飛行/遊泳における流体構造連成の原理と利点を理解し、飛行/遊泳ソフトロボットに実装するための設計論・製作方法・制御則の確立を目指す。
ソフトロボット学は、ソフトな体でたくみに運動する生物に着想を得ている。特に飛行生物と遊泳生物では、体の形状が自身に働く流体力を生み、その流体力がソフトな体を変形させるという、流体と構造の連成が起きている。その極限的デザインは、激しく振動する羽ばたき翼および羽ばたき筋骨格系に見ることができ、そこでは複雑で微細な構造が活用されている。本研究計画では、生物の飛行/遊泳における流体構造連成の原理と利点を理解し、飛行/遊泳ソフトロボットに実装するための設計論・製作方法・制御則の確立を目指す。
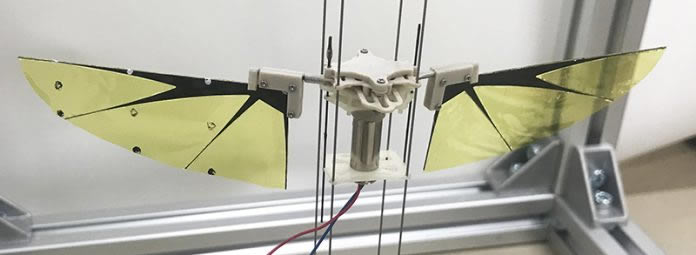 規範とする生物は、約1万種の多様性を誇る鳥類から、遊泳生物としてペンギンを、飛行生物としてハチドリを代表種として選ぶ。どちらも翼を羽ばたかせて推進するが、外部流体が水(高密度、低動粘度、高Re数)と空気(低密度、高動粘度、低Re数)という点が異なる。従って、鳥類共通の基本構造が、異なる条件でどのように設計されるかを明らかにできる。研究計画は以下4項目で構成する。(1) 新規動物搭載センサ、モーションキャプチャ、多数カメラ画像解析を駆使した動物及びロボットの3次元運動・形状計測、(2) レーザ顕微鏡及び高解像度X線CTを駆使したマルチスケールな鳥類形態の計測、(3) 数値計算及び実験モデルによる翼・筋骨格系の流体構造連成メカニズムの解明と最適化、 (4) レーザ加工、自己組織化シワ、折り紙立体構造など、サブミリからセンチメートルオーダの新規微細加工を駆使したソフトロボットへの実装。これらを通じて、生物ならではの俊敏性、効率性、ロバスト性を飛行・遊泳ソフトロボットで実現する。
規範とする生物は、約1万種の多様性を誇る鳥類から、遊泳生物としてペンギンを、飛行生物としてハチドリを代表種として選ぶ。どちらも翼を羽ばたかせて推進するが、外部流体が水(高密度、低動粘度、高Re数)と空気(低密度、高動粘度、低Re数)という点が異なる。従って、鳥類共通の基本構造が、異なる条件でどのように設計されるかを明らかにできる。研究計画は以下4項目で構成する。(1) 新規動物搭載センサ、モーションキャプチャ、多数カメラ画像解析を駆使した動物及びロボットの3次元運動・形状計測、(2) レーザ顕微鏡及び高解像度X線CTを駆使したマルチスケールな鳥類形態の計測、(3) 数値計算及び実験モデルによる翼・筋骨格系の流体構造連成メカニズムの解明と最適化、 (4) レーザ加工、自己組織化シワ、折り紙立体構造など、サブミリからセンチメートルオーダの新規微細加工を駆使したソフトロボットへの実装。これらを通じて、生物ならではの俊敏性、効率性、ロバスト性を飛行・遊泳ソフトロボットで実現する。