
B01-10:蠕動運動による柔らかい駆動に適応した生物的創発性の高い分散型制御系の確立
研究代表者
概要
| 研究代表者 | 中村 太郎(中央大学) |
|---|
蠕動運動は構造的柔軟性が高いゆえに「外部環境や外部刺激の変化に影響を受けやすいソフトロボット機構」である、本研究では蠕動運動型駆動システムに対して、外部環境の変化に柔軟に適応できる制御系設計の確立を目的とする。特に本テーマでは腸管の搬送・混合機能を規範とした蠕動ポンプに対して生物的創発性の高い制御系を適用しその有効性検討する。
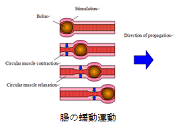
蠕動運動とは、人体の消化器官系やミミズの移動手法に見られるような環状形状における非骨格系の運動様式であり、主に軸方向への収縮と半径方向への膨張・収縮によって誘発される移動や搬送手段を指す。ソフトロボティクスにおける位置づけとしては、「柔軟駆動」・「非骨格機構」・「分散系」であり、今後のソフトロボティクスのキーテクノロジーとして大きな注目を浴びている。
特に腸管の運動は2種類の平滑筋(輪状筋と縦走筋)の収縮により蠕動運動をおこし、高粘度・固液混相流である食塊を「柔らかく・揉むように」効率よく運搬する。また管内には無数の感覚器と神経が分散されて配置されている。腸管はこれらのセンシング情報のネットワーク化により、腸管内の食塊の状況や人の精神状態をはじめとした周辺環境等の外的要因に対して、脳からの指令とは独立して制御されている唯一の臓器である。このことから「第2の脳」と称されることもあるが、その搬送・混合メカニズムは十分に解明されていない。

本研究ではソフトアクチュエータを用いた全く新しい腸管型の蠕動運動ポンプを開発し、複雑な操作パラメータと被搬送流体の流動との相関関係について、自律分散制御やニューラルネットワークによる深層学習等の生物学的創発性の高い制御法の適用により明らかにする。
これらは、「腸の蠕動運動による搬送・混合プロセスの解明」、ひいては「蠕動ポンプの柔らかい運動に適した効率的な搬送・混合手法の確立」につながり、ソフトロボット学において「MIMO系柔軟構造物の駆動における生物的制御系の確立」につながるものと考える。