
B01-22 : Study on triggers for bio-robots to express autonomous actuations
Summary
| Leader | Shotaro Tanaka (Tokyo Women’s Medical University) |
|---|
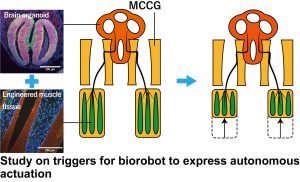
We have tried to construct bio-robots with autonomous actuations by assembling brain-organoids and engineered muscle tissues in “Science of Soft Robot”. We established a method for co-culturing the brain organoids and the engineered muscle tissues, and recently found that the bio-robot expresses local-autonomous actuation. However, the bio-robot did not express macroscopic autonomous actuations, such as contraction and bending of whole engineered muscle tissues. What are triggers for bio-robots to express the macroscopic, autonomous actuations? Elucidating this problem is a purpose of this study. For this purpose, we will study effects of connection between the brain organoid and the engineered muscle tissues on the autonomous actuation of bio-robot. If the purpose is achieved, we could establish the method for implementing various self-modification functions, such as self-renewal, self-recovery, learning, and memory, to bio- and soft-robots. Furthermore, we believe that an elucidation of mechanism for functional connecting between the brain and the muscle tissues contributes to establish treatments for loss of motor function.